

A bionic hand mechanism and a robot using the bionic hand mechanism
A bionic hand and palm technology, applied in the field of bionic hand mechanisms, can solve the problems of impossibility of fine movements, weak grip, and inflexible use
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The present invention will be described in detail below with reference to the accompanying drawings and specific embodiments.
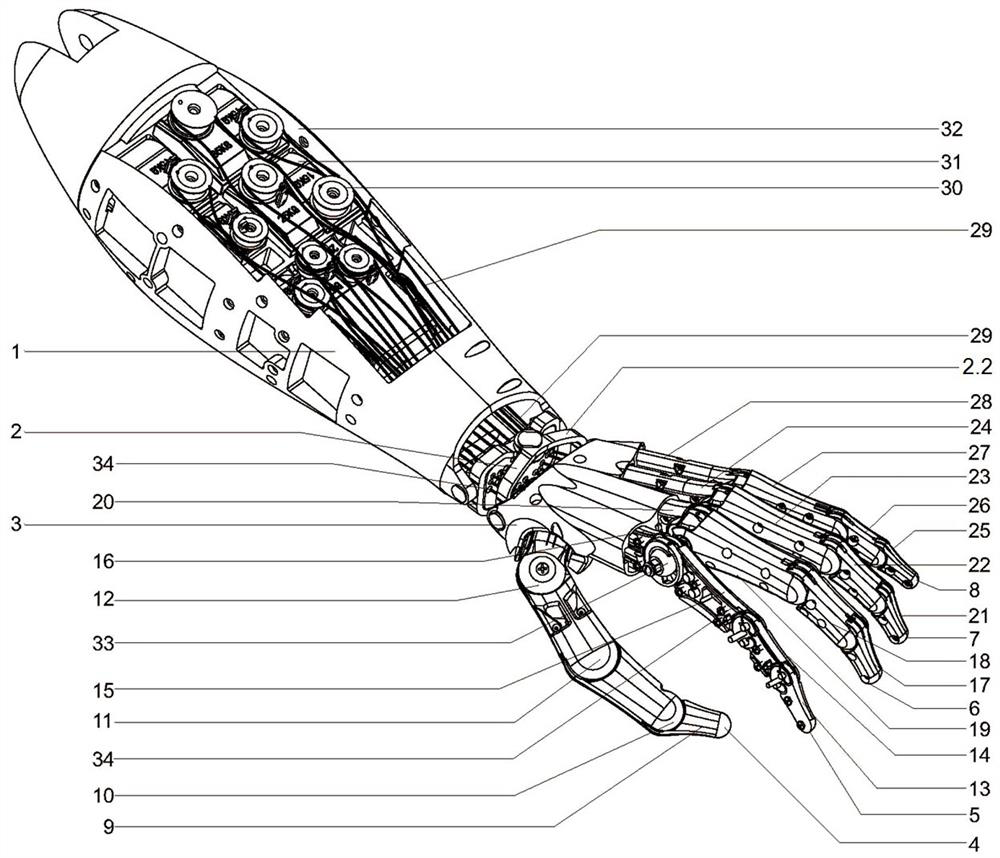
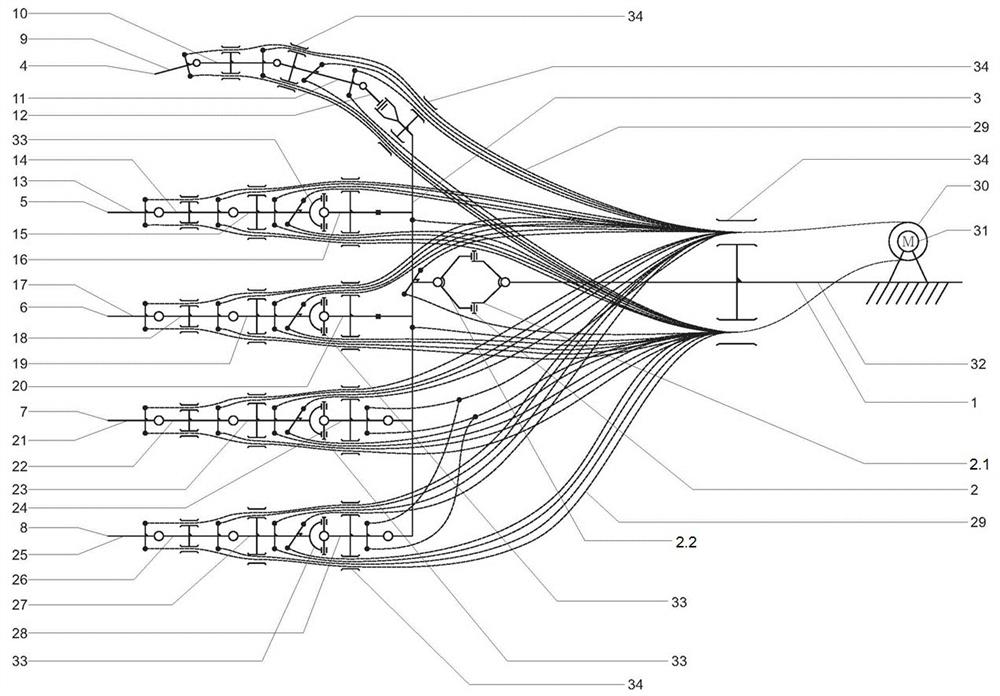
[0040] The structure of an embodiment of the bionic hand mechanism of the present invention is as follows: figure 1 As shown, the bionic hand mechanism of this embodiment includes an arm assembly 1, a palm assembly 3 and five finger assemblies, and the five finger assemblies are the thumb 4, the index finger 5, the middle finger 6, the ring finger 7 and the little finger 8 respectively. There is a motor 31 and a winch 30 that rotates under the drive of the motor 31. The pulling wire 29 is wound on the winch 30. The arm assembly 1 includes a support frame located inside and a casing 32 located outside. The motor 31 and the winch are wound. The wheels 30 are arranged on the support frame.
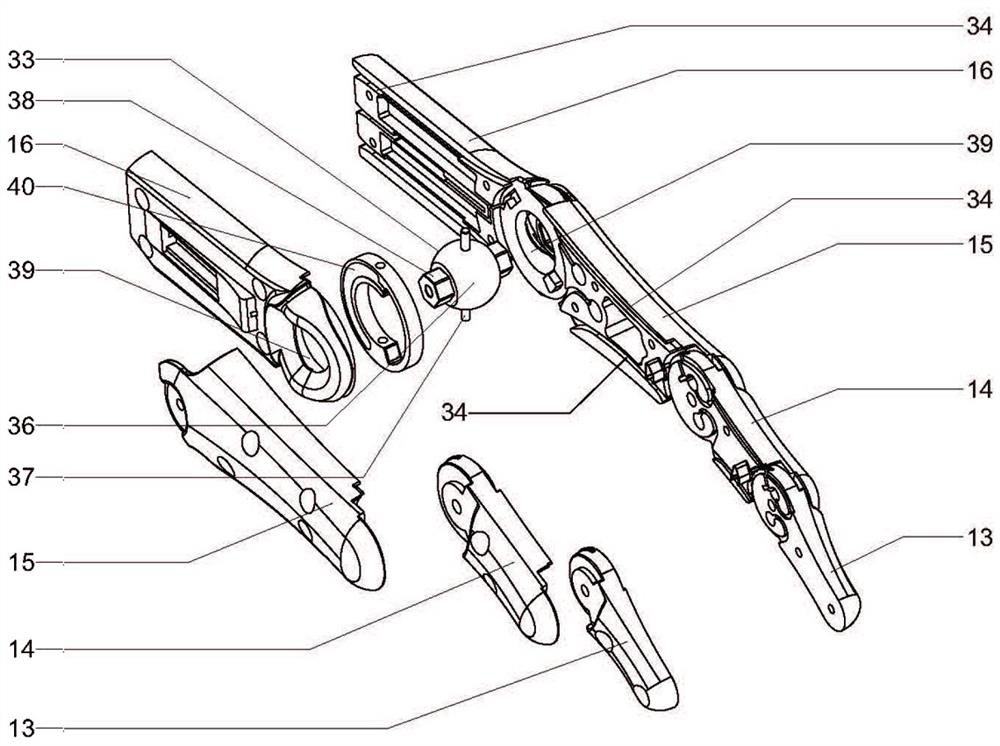
[0041] Each finger assembly includes four joints, and the four joints of each finger assembly are the first, second, third, and fourth sections, respectively...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More