

Robust control method for human-machine co-driving based on driver nms characteristics
A robust control and driver technology, applied in the field of human-machine co-driving, can solve problems such as the driver's neuromuscular system, and achieve the effect of improving the path tracking ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] The present invention is further described below in conjunction with the accompanying drawings, as shown in the figure:
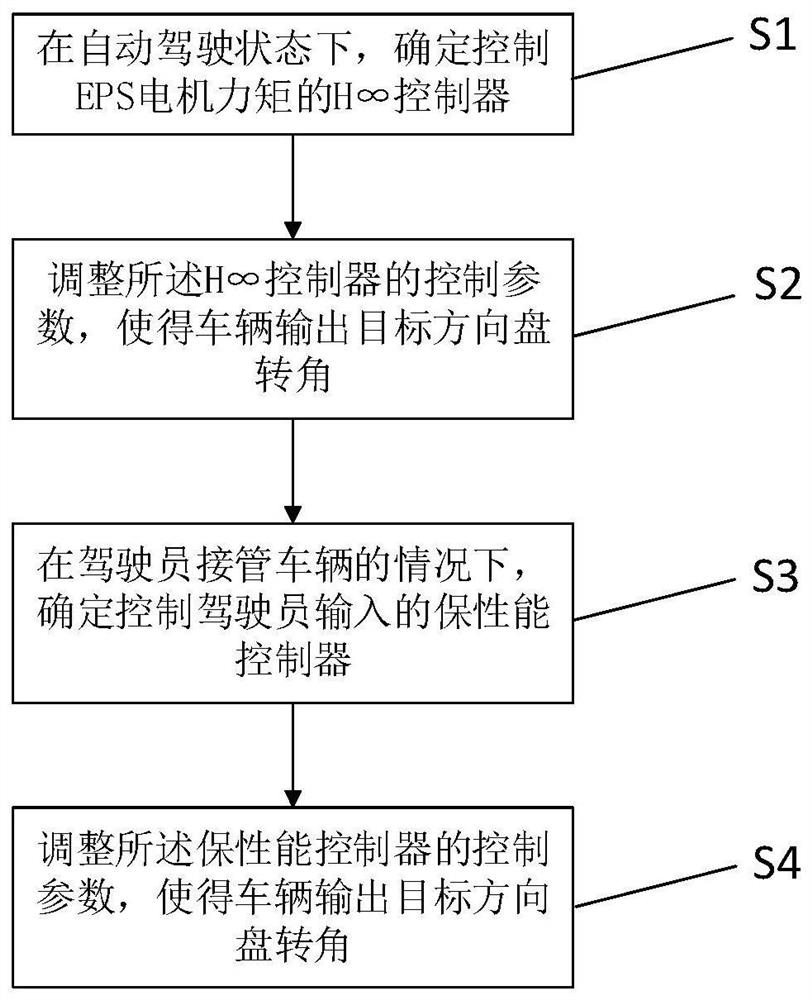
[0042] The man-machine co-driving robust control method based on the driver's NMS feature of the present invention comprises the following steps:
[0043] S1. In the automatic driving state, determine the H that controls the torque of the EPS motor ∞ controller;
[0044] S2. Adjust the H ∞ The control parameters of the controller make the vehicle output the target steering wheel angle;
[0045] S3. In the case where the driver takes over the vehicle, determine the safety performance controller that controls the driver's input;
[0046] S4. Adjust the control parameters of the performance controller so that the vehicle outputs the target steering wheel angle.
[0047] Among them, the EPS is the abbreviation of Electric Power Steering, that is, an electric power steering system, which is an existing concept.
[0048] It should be noted that, in or...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More