

Urban canyon positioning method based on GNSS/vision/Lidar fusion
A technology of urban canyons and positioning methods, which is applied in the field of satellite positioning and navigation, and can solve problems such as difficult implementation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0077] Embodiments of the present invention will be described below with reference to the accompanying drawings.
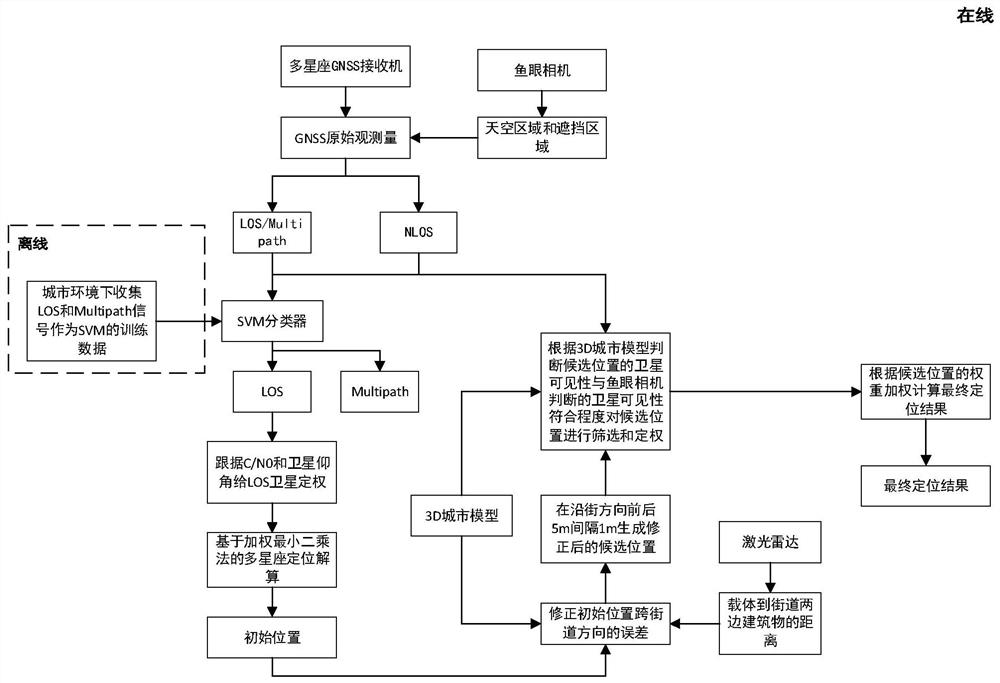
[0078] Such as figure 1 Shown is a flow chart of an urban canyon positioning method based on GNSS / vision / Lidar fusion provided by the embodiment of the present application, including the following steps:
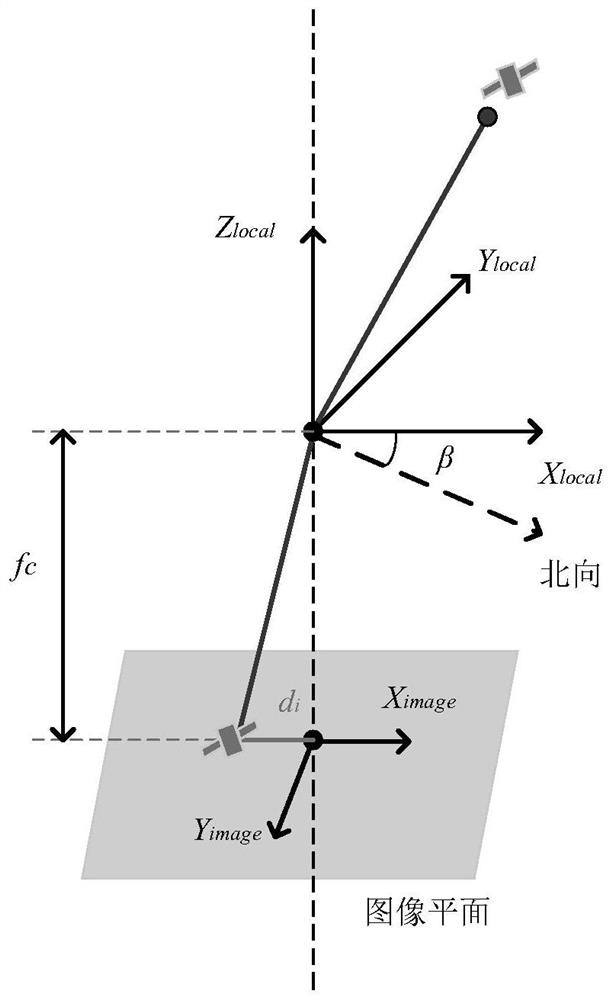
[0079] Step 1, using the fisheye camera to judge satellite visibility;
[0080] Step 2, further judge the signal type of the visible satellite based on the supervised learning method;
[0081] Step 3, determine the weight of the satellite and perform multi-constellation positioning solution based on the satellite weight to obtain the initial positioning solution;
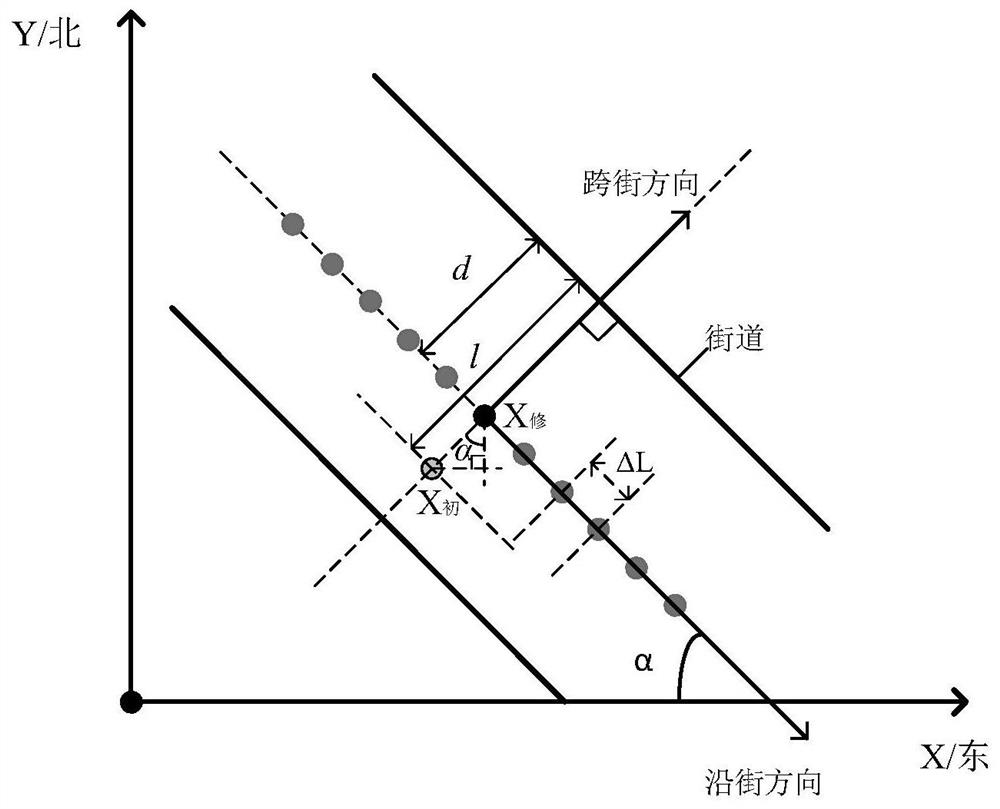
[0082] Step 4, modify the initial positioning solution and generate candidate positions;
[0083] Step 5, screening the candidate positions and calculating the candidate position weights according to the degree of conformity between the satellite visibility of the candidate positions and the satell...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More