

Non-linear model predictive control method for single pedal of pure electric vehicle
A nonlinear model, pure electric vehicle technology, applied in electric vehicles, control drives, control devices, etc., can solve problems such as poor driving safety and ride comfort, lack of single-pedal control methods, and sudden changes in vehicle longitudinal acceleration.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0062] The present invention will be further described in detail below with reference to the accompanying drawings and embodiments.
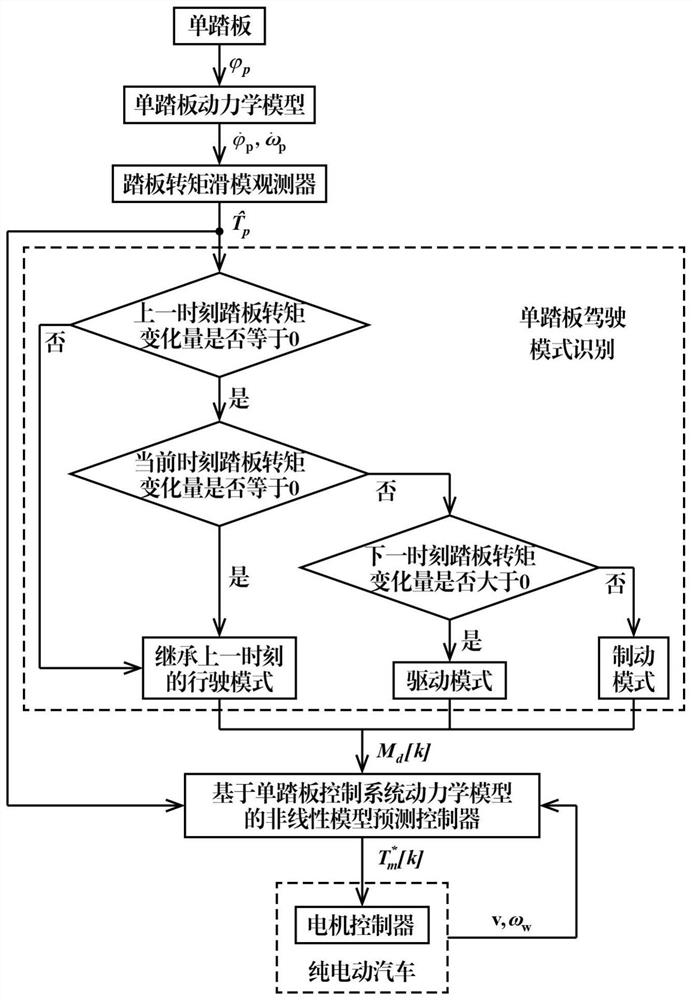
[0063] In this embodiment, a nonlinear model predictive control method for a single pedal of a pure electric vehicle, such as figure 1 shown, the specific steps are as follows:
[0064]Step 1, collect the real-time pedal opening degree through the pedal position sensor;
[0065] Step 2, use formula (1) to establish a single pedal dynamics model, which is used to describe the relationship between pedal opening, pedal rotational angular velocity and pedal torque:
[0066]
[0067] In formula (1): is the pedal opening, is the derivative of the pedal opening, ω p is the angular velocity of the pedal rotation, is the derivative of the pedal rotational angular velocity, I p is the pedal moment of inertia, T p is the pedal torque operated by the driver, k s is the stiffness of the pedal return spring, k p is the compression conversion co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More