

Trajectory generation method and device, computing equipment and computer readable storage medium
A trajectory generation and trajectory technology, applied in the field of automatic driving equipment, trajectory generation method, trajectory generation device, computing equipment and computer-readable storage media, can solve the problem of trajectory curvature discontinuity, achieve continuous curvature, high efficiency, and calculation The effect of simple process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
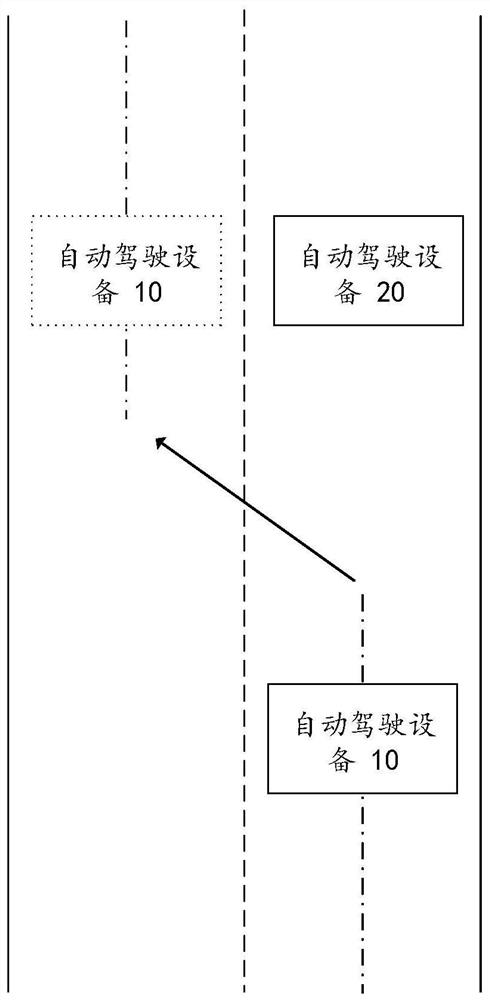
[0048] An embodiment of the present invention provides an automatic driving device 10 . figure 1 It is a schematic structural diagram of an automatic driving device 10 according to an embodiment of the present invention, figure 2 It is an application environment diagram of the automatic driving device provided by the embodiment of the present invention. see figure 1 , the automatic driving device 10 includes a main body of the automatic driving device and a trajectory generating device 200, and the trajectory generating device 200 is arranged on the automatic driving device. Wherein, the self-driving device may be a self-driving car, a drone and other devices. Such as figure 2As shown, taking the self-driving car as an example, its application scenario is: when the self-driving device 10 in the same lane needs to overtake, it needs to change lanes, and the trajectory generation device 200 in the self-driving device 10 can 20 and the driving information of the automatic d...
Embodiment 2
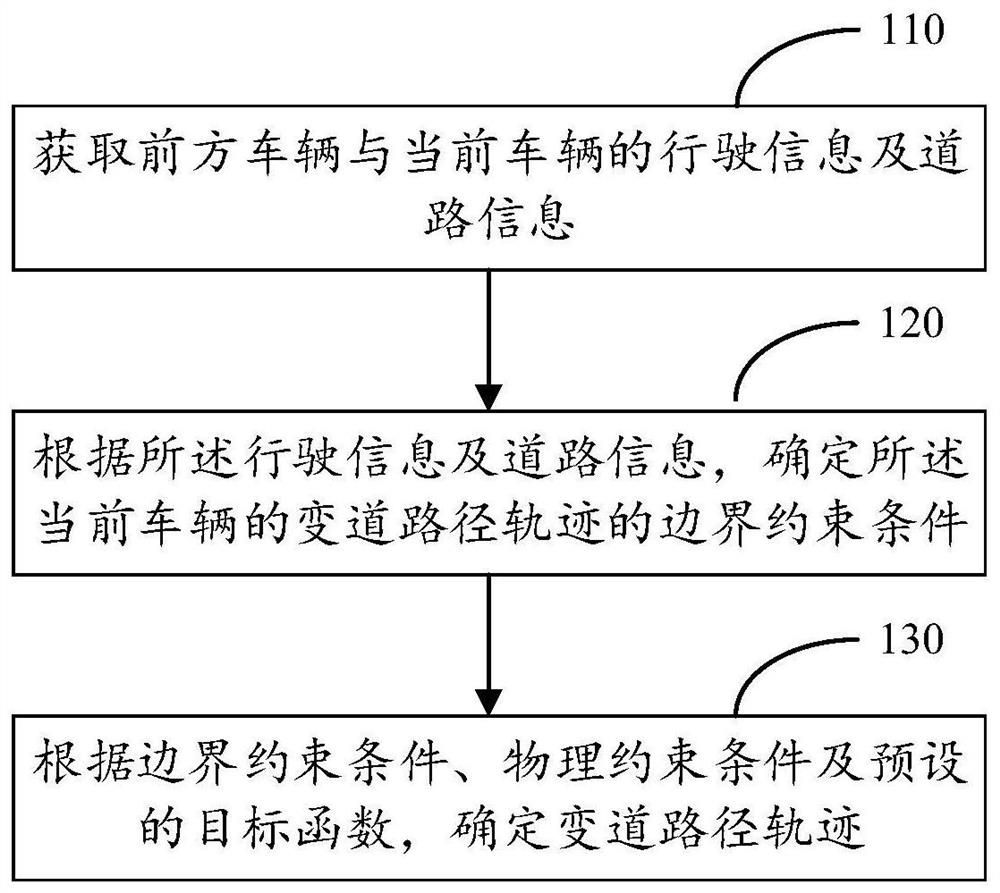
[0050] image 3 A flow chart of an embodiment of the trajectory generation method of the present invention is shown, the method being executed by a computing device. The computing device may be the aforementioned automatic driving device (such as a self-driving car), a computer device, a terminal, and the like. Such as image 3 As shown, the method includes the following steps:
[0051] Step 110: Obtain the driving information and road information of the vehicle in front and the current vehicle.
[0052] Among them, the road information can be obtained through the high-precision map of the automatic driving device; the driving information of the vehicle in front and the current vehicle can be determined according to the sensing module on the automatic driving device.
[0053] Taking an autonomous vehicle as an example, in the embodiment of the present invention, the driving information of the vehicle ahead and the current vehicle includes the speed of the vehicle ahead, the...
Embodiment 3
[0090] Figure 6 A schematic structural diagram of an embodiment of the trajectory generation device of the present invention is shown. Such as Figure 6 As shown, the apparatus 200 includes: an acquisition module 210 , a first determination module 220 and a second determination module 230 .
[0091] An acquisition module 210, configured to acquire driving information and road information of the vehicle in front and the current vehicle;
[0092] The first determination module 220 is configured to determine the boundary constraints of the lane-changing path trajectory of the current vehicle according to the driving information and road information;
[0093] The second determination module 230 is configured to determine the trajectory of the lane-changing path according to the boundary constraints, physical constraints and a preset objective function; the objective function is used to characterize points on the trajectory of the lane-changing path Curvature change cost.
[0...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More