Distance to obstacle detection in autonomous machine applications
A distance, distance value technology, applied in the distance field of obstacle detection in autonomous machine applications, can solve problems such as failure to engage, inaccurate prediction, passenger discomfort or injury, and achieve the effect of reducing the training period
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
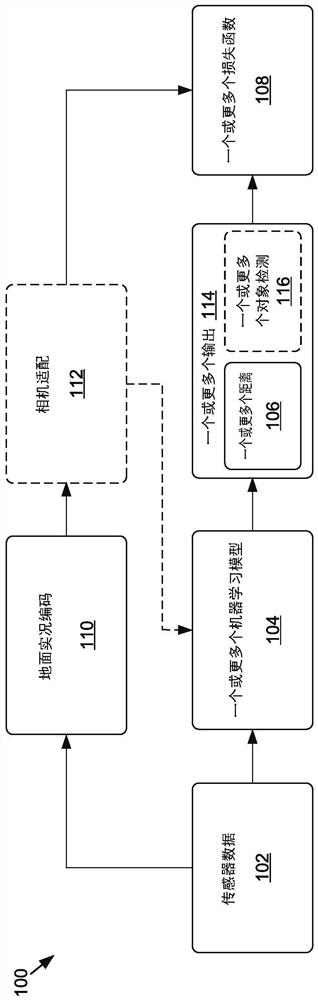
[0035] Systems and methods related to distance for obstacle detection in autonomous machine applications are disclosed. Although the present disclosure may be described with respect to an example autonomous vehicle 1400 (alternatively referred to herein as "vehicle 1400", "ego vehicle 1400" or "autonomous vehicle 1400"), examples thereof refer to Figures 14A-14D description, but not limitation. For example, the systems and methods described herein can be implemented by, but not limited to, non-autonomous vehicles, semi-autonomous vehicles (e.g., in one or more Adaptive Driver Assistance Systems (ADAS)), robots, warehouse vehicles, off-road vehicles , airships, boats, shuttles, emergency vehicles, motorcycles, electric or motorized bicycles, aircraft, construction vehicles, underwater craft, drones and / or other vehicle types. Additionally, although the present disclosure may be described with respect to autonomous driving or ADAS systems, this is not limiting. For example, t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com