Three-dimensional flexible touch sensor
A tactile sensor, three-dimensional flexible technology, applied in the measurement of the change force of the magnetic property of the material caused by the applied stress, etc., can solve the problems of low sensitivity, inability to induce large-scale rearrangement effect of conductive phase, and sensitivity drop
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
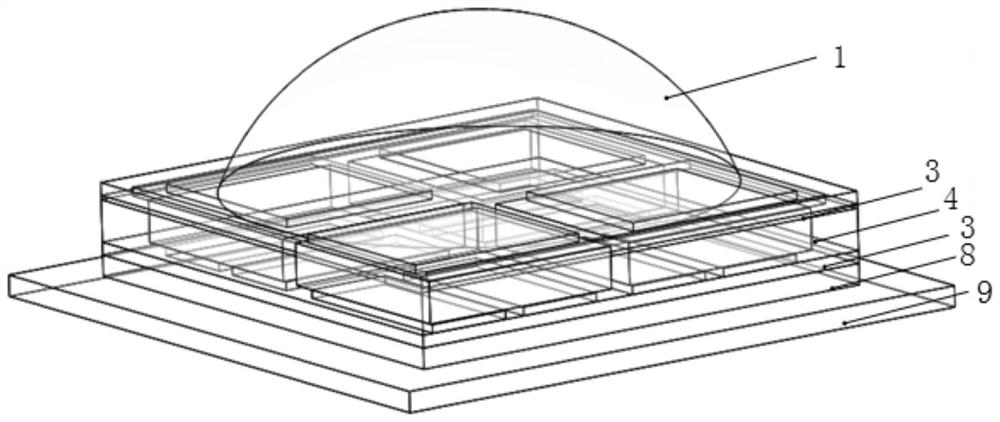
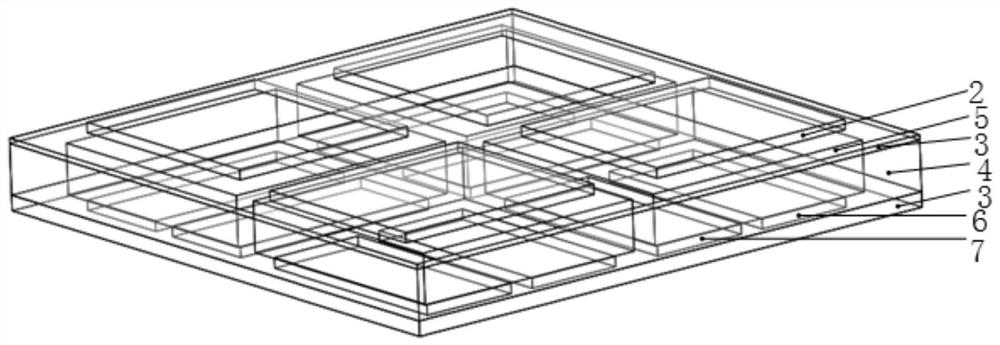
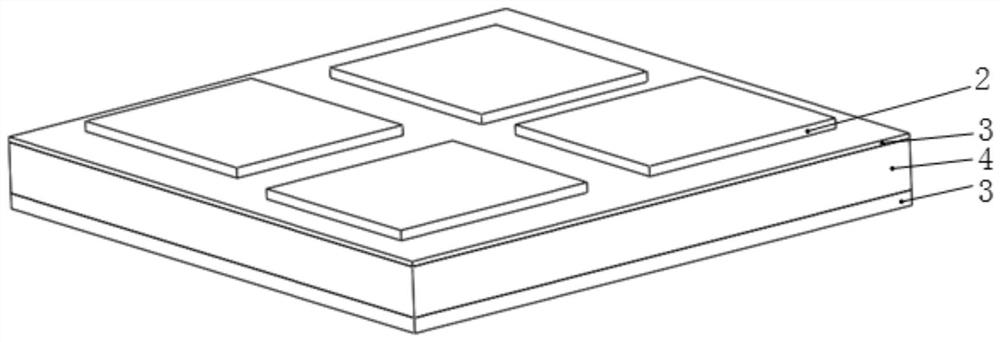
[0041] see Figure 1 to Figure 8 , a three-dimensional flexible tactile sensor, including a floating electrode 2, an insulating layer 3, an organic elastomer 4, a prestructured conductive elastomer 5, a driving electrode 6, a sensing electrode 7, a flexible PCB board 8 and a substrate 9.
[0042] A layer of hemispherical protrusion layer 1 covers the floating electrode array arranged in M×N. M=2=N.
[0043] Several floating electrodes 2 are pasted on the upper surface of the first insulating layer 3 .
[0044] The second insulating layer 3 is covered on the flexible PCB 8 .
[0045] The pre-structured conductive elastomer 5 is located between two insulating layers 3 .
[0046] The prestructured conductive elastomer 5 includes an organic elastomer 4 and several magnetic particles 10.
[0047] The organic elastomer 4 is a hollow cavity.
[0048] The organic elastomer is a matrix (insulating, insensitive to external force), and the magnetic particles (metal, conductive) insi...
Embodiment 2
[0069] see Figure 8 , the method of realizing three-dimensional tactile sensing based on the sensitivity difference of conductive elastomer magnetic field pre-structuring is described as follows. The sensing unit contains a total of 4 sensitive subunits x-, x+, y-, y+, and the 4 sensitive subunits have different pre-structured directions (angles), and the floating electrode 1, the sensing electrode 4, and the driving electrode 5 have Different overlapping features.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More