

Mechanical arm inverse kinematics solving method based on variable-dimension scaling
A robotic arm and scaling technology, applied in the field of robotics, can solve problems such as complexity, inability to achieve obstacle avoidance, non-unique inverse solution of robotic arm kinematics, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] The present invention will be further elaborated below in conjunction with embodiment.
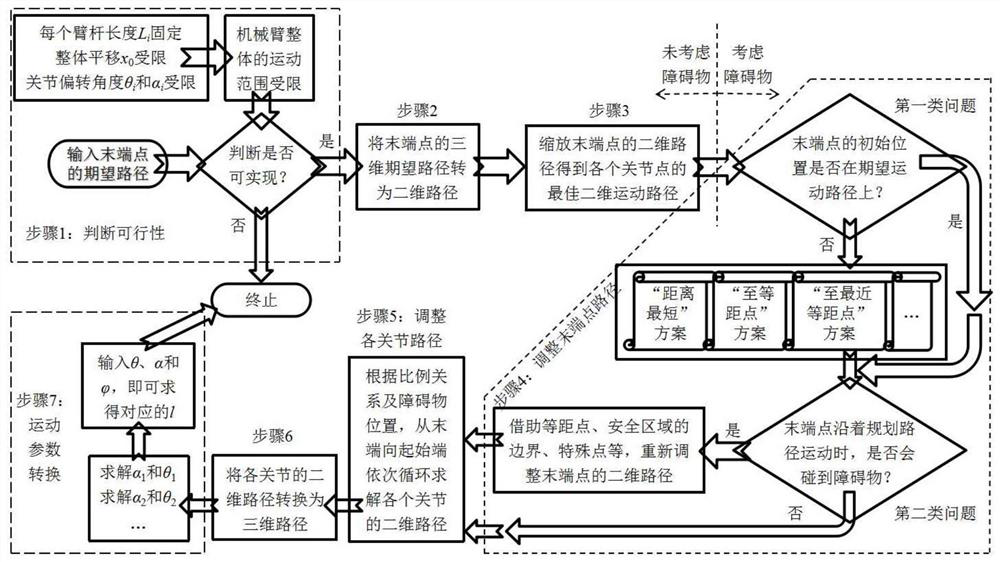
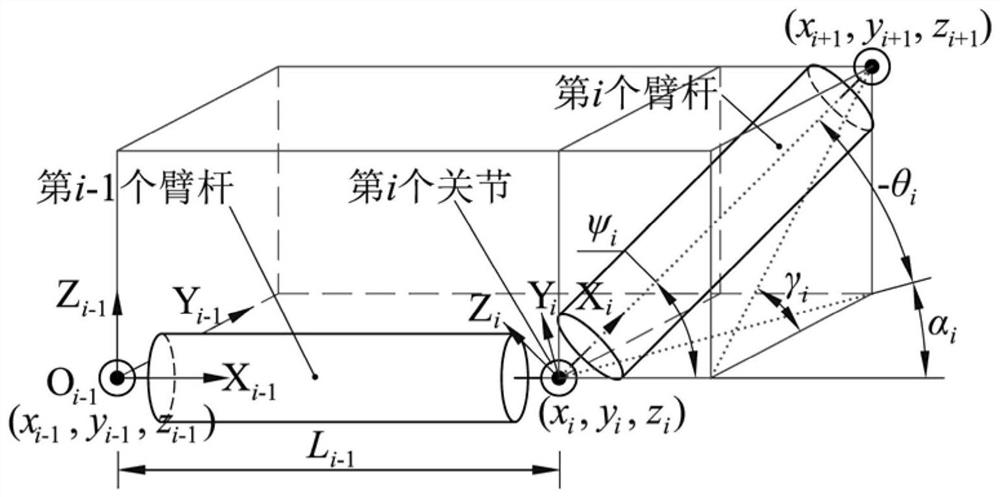
[0046] In this method, obstacles are not considered first, and the path of the end point of the mechanical arm is scaled according to a certain ratio, so as to obtain the path of each joint, and the proportional relationship is related to the length of the arm. If the arm stick touches an obstacle when moving along the path, adjust the movement path of the end point of the mechanical arm and the center point of each joint according to the position of the obstacle and a certain proportional relationship. Plan the path of each joint center point that can realize the movement of the end point of the manipulator according to the expected path and realize obstacle avoidance. Finally, through the inverse kinematics solution of the motion path of each joint center point, the variation law of the pitch angle and yaw angle of each joint can be obtained.
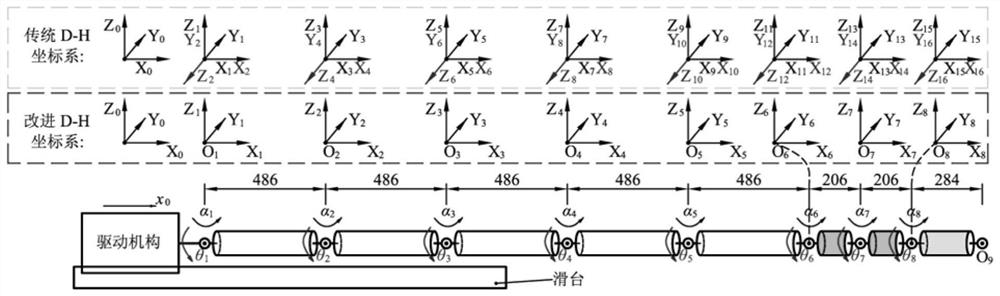
[0047] figure 2 It is a schematic...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More