

Robot suitable for detecting underwater and overwater parts of bridge pile foundation and control method
A technology of robots and pile foundations, applied in the field of robots, can solve problems such as high cost and complex robots, and achieve the effects of small overall size, good versatility, and insufficient clarity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
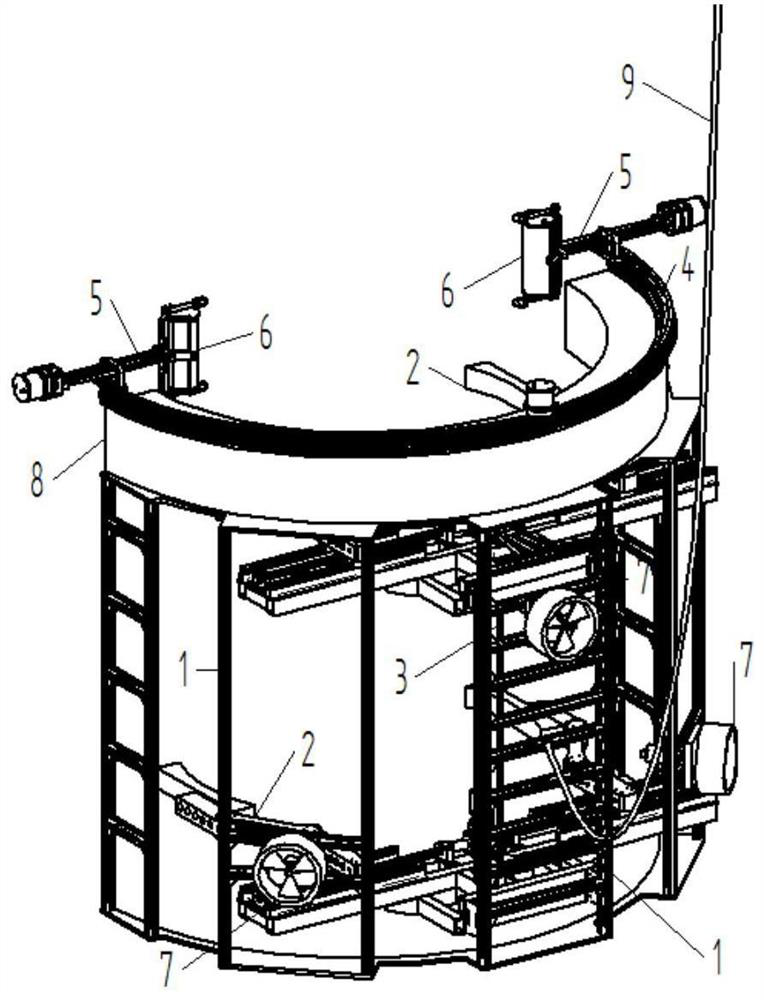
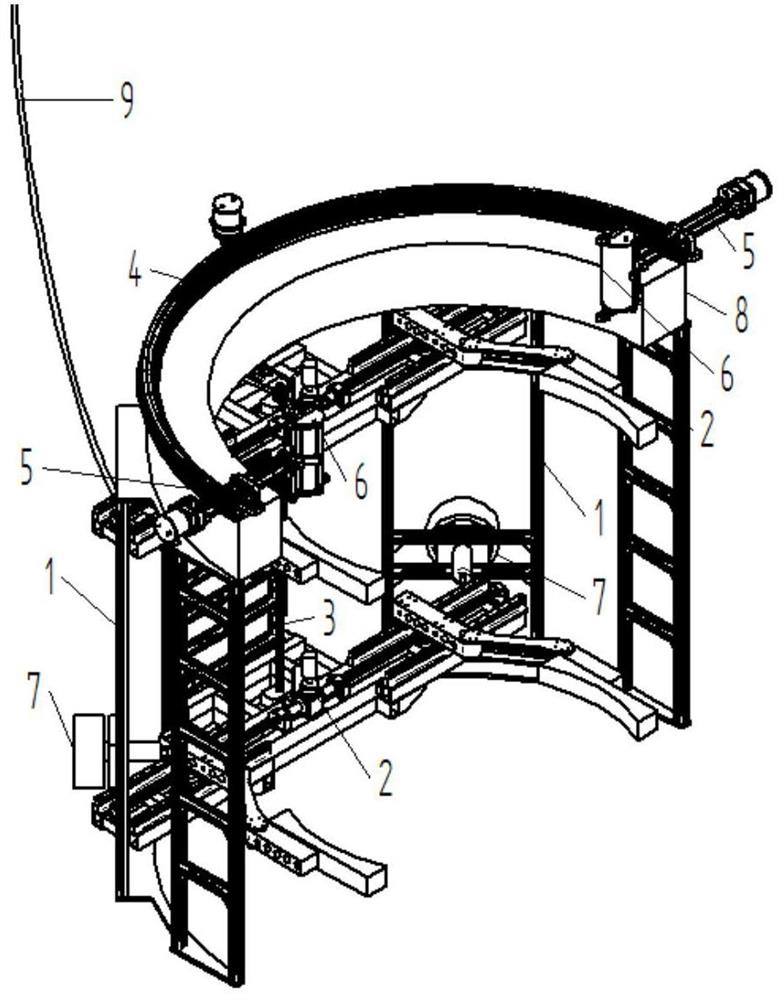
[0056] Embodiment one: see attached figure 1 and figure 2 , a robot suitable for testing the underwater and above-water parts of bridge pile foundations, which is in the shape of a "U" or a semicircle as a whole, including a frame 1, two sets of upper and lower holding mechanisms 2, a walking mechanism 3, a rotating mechanism 4, Adjusting mechanism 5, observation mechanism 6, propeller 7, buoyancy bucket 8, cable 9 and shore support equipment 10 (not shown in the figure).
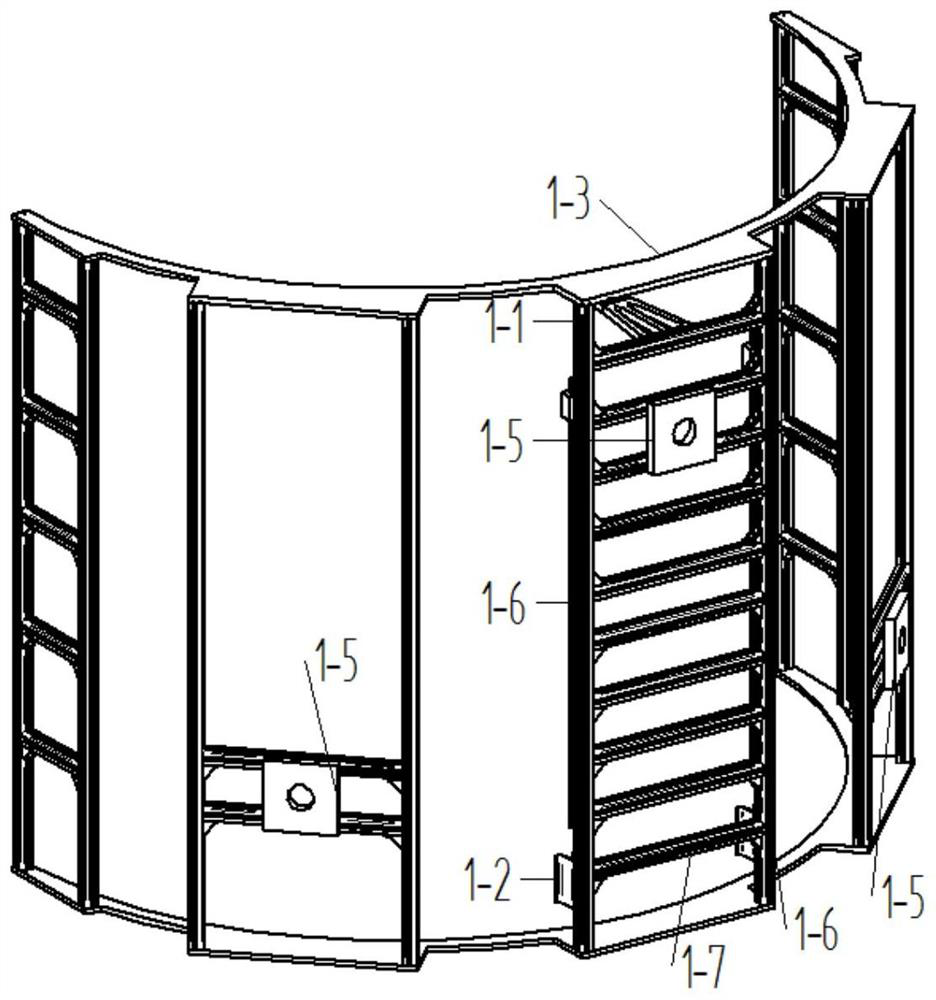
[0057] See attached image 3 and Figure 4 , the frame 1 includes a column 1-1, a base 1-2, a top seat 1-3, a slide rail 1-4, and a propeller mount 1-5; the column 1-1 includes two parallel vertical The beam 1-6 and the horizontal reinforcement beam 1-7 located in the middle of the vertical beam and perpendicular to the vertical beam, the base 1-2 is spliced by several cross beams and reinforcement beams that can ensure strength, installed vertically At the bottom of the column 1-1, the top seat 1-3 ...
Embodiment 2
[0077] Embodiment two: a kind of robot control method, it adopts the robot described in embodiment one, it comprises the following steps:
[0078] S10. Connect the robot to the computer or remote control device after completing the weighing work and self-inspection. The computer or remote control device is used to control the robot to perform various preset actions;
[0079] S20. Use the crane to hoist the robot into the water near the pile foundation of the bridge, start the propeller 7 to push the robot to the near point of the pile foundation, and after adjusting the posture and entry angle, align the open end of the robot with the pile foundation and slowly approach it;
[0080] S30. Control the two-layer clamping mechanism 2 to work, use the upper and lower sets of clamping blocks to clamp the pile foundation tightly, and fix the robot on the pile foundation to be detected;
[0081] S40, control the adjustment mechanism 5 to work, slowly approach the observation mechanism...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More