

Inner and outer ring PID path tracking control method of wave glider
A technology of path tracking and control methods, which is applied to controllers with specific characteristics, electric controllers, etc., and can solve problems such as difficulty in path tracking control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0013] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
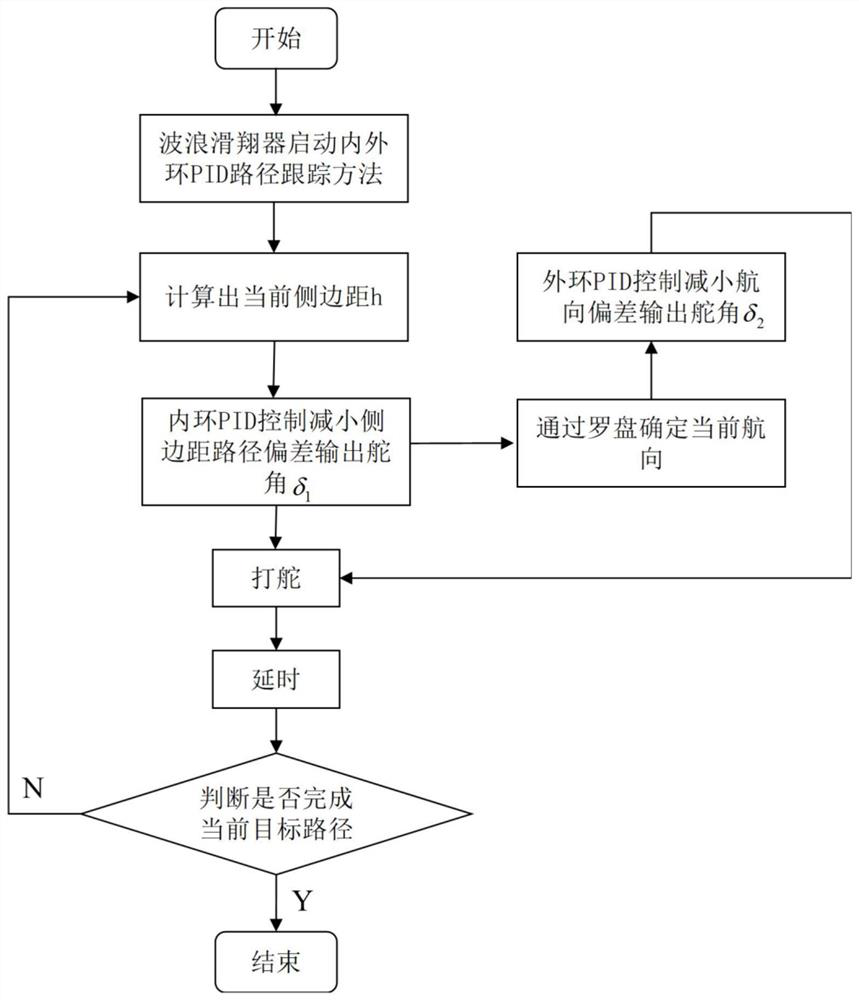
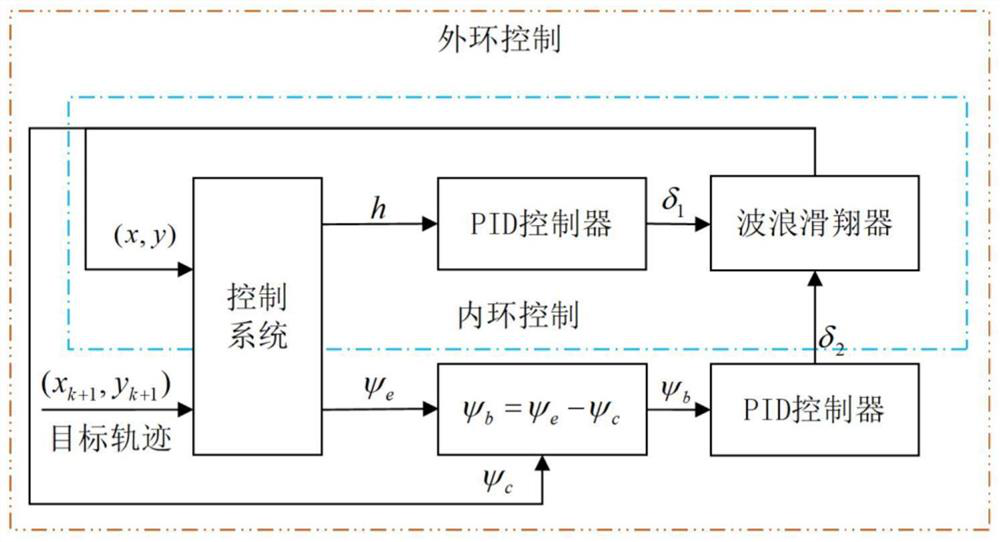
[0014] like figure 1 As shown, the wave glider starts the inner and outer ring PID path tracking control method, and the current position (x, y) of the wave glider is given by GPS real-time positioning, and the system calculates the side distance h between the current position (x, y) and the expected trajectory. The inner loop control is to input the current side distance h to the PID heading controller, and output the rudder angle δ 1 , making the wave glider vertically towards the desired path P 1 P 2 move. The outer loop control is: set the target point (x k+1 ,y k+1 ) into the control system of the wave glider to obtain the desired heading ψ e , and then read the current heading ψ through the compass c (that is, the inner loop controls the output rudder angle), and the deviation ψ between the current heading and the expected headin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More