

Human body inverse dynamics solving method and device based on deep learning
An inverse dynamics and deep learning technology, applied in the field of computer graphics and computer animation, can solve the problems of unnatural human posture and lack of realism, and achieve the effect of natural posture and more posture.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
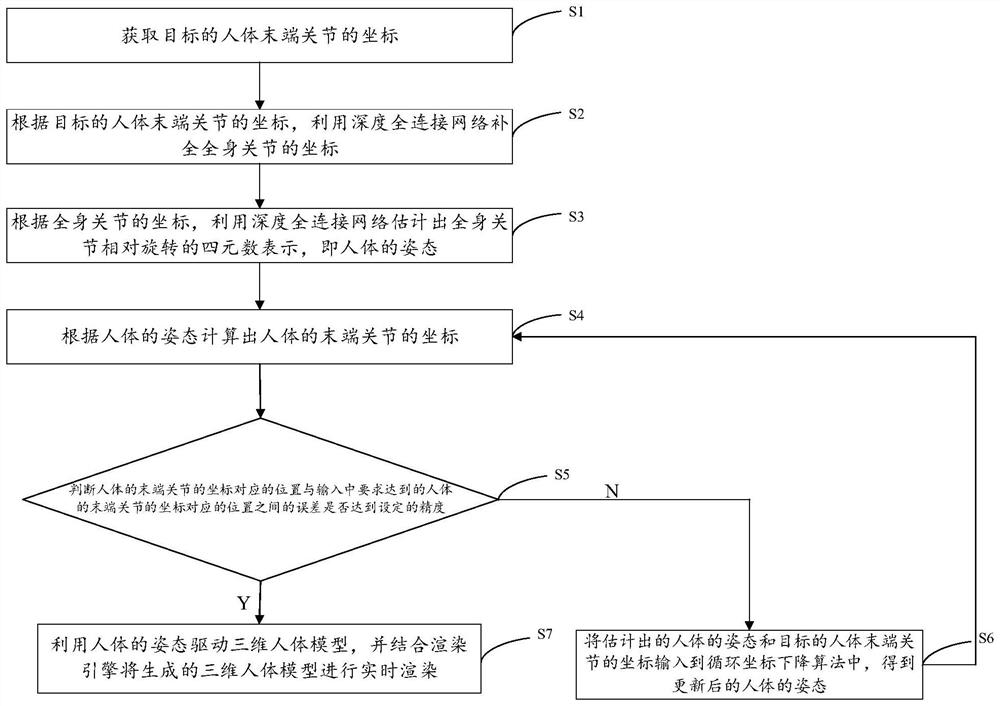
[0032] figure 1 It is a schematic flow chart of the human body inverse dynamics solution method based on deep learning provided according to an embodiment of the present application, such as figure 1 As shown, can include:
[0033] Step S1. Obtain the coordinates of the target's human body end joints.
[0034] Wherein, the terminal joints in this application include joints corresponding to the hands, feet and head of the human body.
[0035] Step S2, according to the coordinates of the end joints of the target human body, the coordinates of the joints of the whole body are complemented by using the deep fully connected network.
[0036] Among them, the coordinates of the end joints of the human body are the coordinate difference between the corresponding end joints and the root node in the world coordinate system, so as to exclude the influence of the position of the root node.
[0037] And, the present application first randomly selects the global rotation of the root node...
Embodiment 2
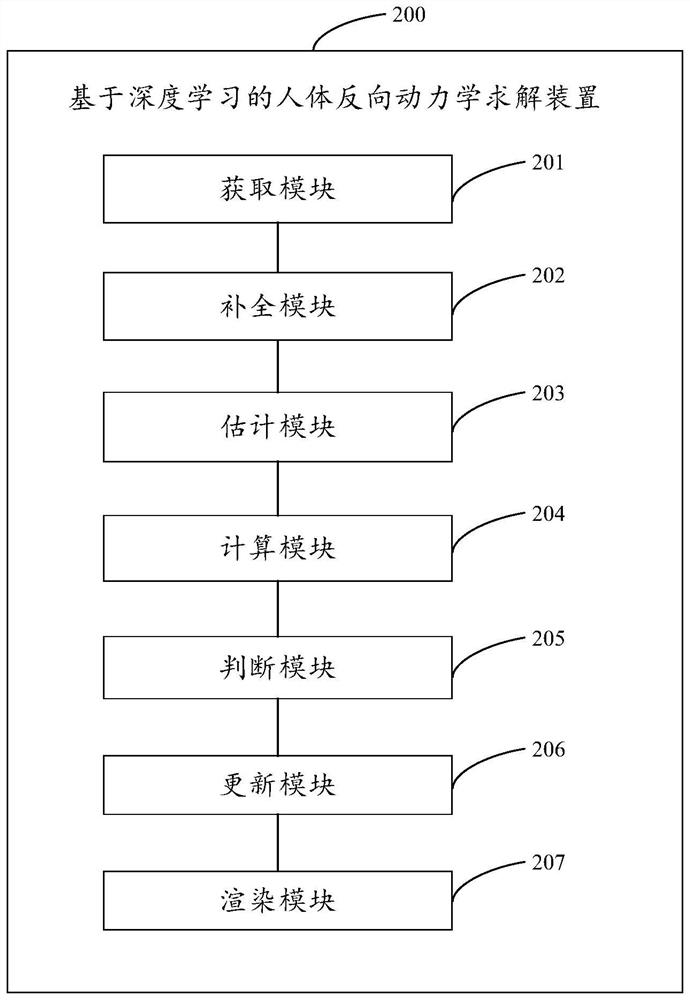
[0049] Further, based on the deep learning-based human body inverse dynamics solution method provided in the above embodiments, the embodiment of the present application also provides a deep learning-based human body inverse dynamics solution device 200, figure 2 It is a schematic structural diagram of a human body inverse dynamics solving device based on deep learning provided according to an embodiment of the present application, such as figure 2 As shown, can include:
[0050] The acquiring module 201 is configured to acquire the coordinates of the end joints of the human body of the target.
[0051] The completion module 202 is configured to complete the coordinates of the joints of the whole body by using the deep fully connected network according to the coordinates of the end joints of the target.
[0052] The estimation module 203 is used for estimating the quaternion representation of the relative rotation of the whole body joints, that is, the posture of the human ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More