

Soft measurement method for tire force of four-wheel drive electric automobile
An electric vehicle, four-wheel drive technology, applied in sustainable transportation and other directions, can solve problems such as inability to apply, tire force prediction method is too ideal, etc., to achieve the effect of improving the scope of application, improving the degree of real response, and improving the accuracy of estimation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
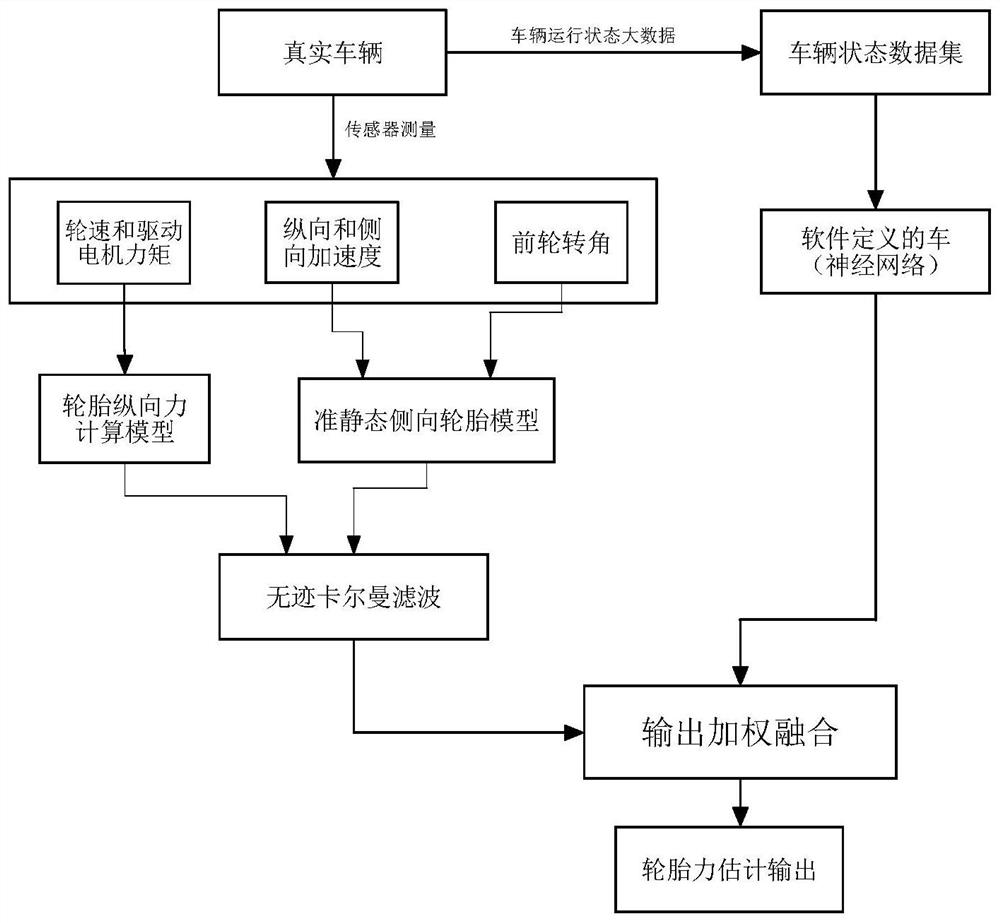
[0081] Such as figure 1 As shown, the four-wheel drive electric vehicle tire softness measuring method of the present invention comprises:
[0082] Step 1: Obtain the longitudinal velocity, side slip angle, longitudinal and lateral acceleration, and front wheel angle of the car through the differential GPS system, gyroscope, and front wheel angle sensor installed on the car;
[0083] Step 2: Through the real-time information on the longitudinal velocity of the vehicle sensor, the front wheel angle and the side slip angle of the center of mass at the current moment collected in the first step, and the tire longitudinal force information obtained through the longitudinal direction of the vehicle CAN, input these information to the nonlinear vehicle dynamics Model, through the calculation of the vehicle model to obtain the estimated longitudinal and lateral acceleration;
[0084] Step 3: Input the sensor measurement information in the second step, all the information obtained by...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More