

Vision-based unmanned rotorcraft course calibration system and method in tunnel environment
A technology of unmanned rotor and tunnel environment, applied in the field of visual measurement, can solve the problems of being susceptible to interference, limited application scenarios, and limited ranging range of ultrasonic sensors, etc., to achieve the effect of ensuring safe flight, simple implementation, and easy calibration
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0059] The application will be further described below in conjunction with the accompanying drawings. The following examples are only used to illustrate the technical solutions of the present invention more clearly, but not to limit the protection scope of the present application.
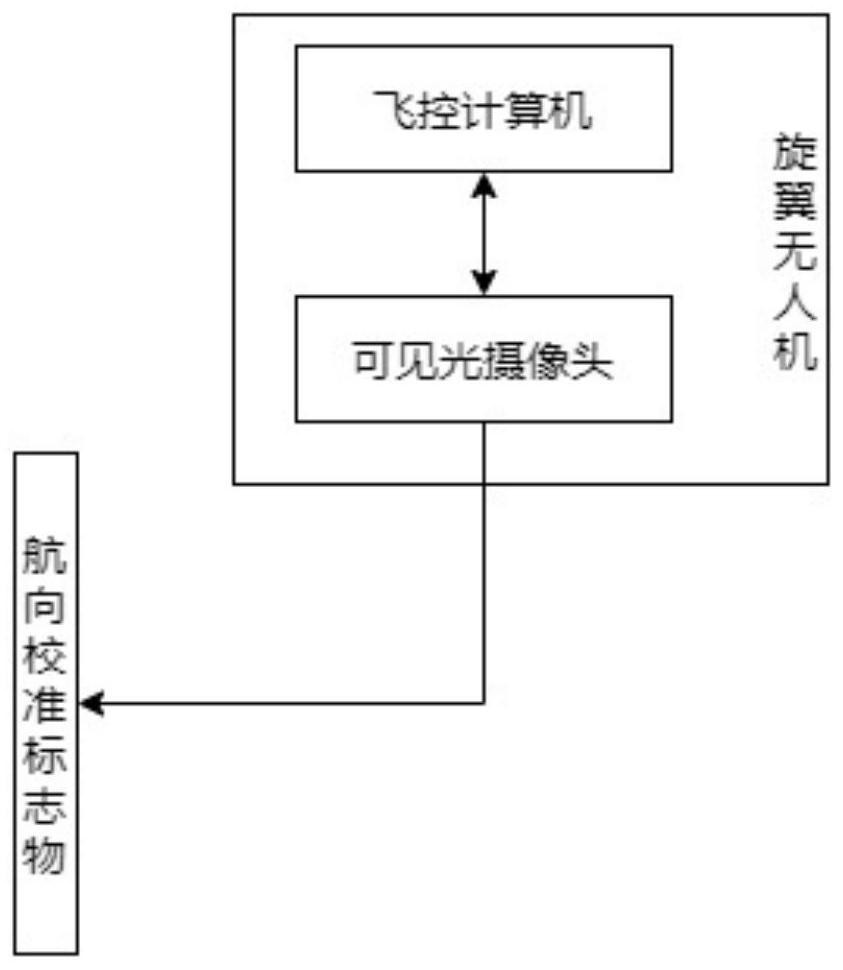
[0060] Such as figure 1 , the vision-based heading calibration system for rotor UAVs in tunnel environments includes: visible light cameras, heading calibration markers, and flight control computers.
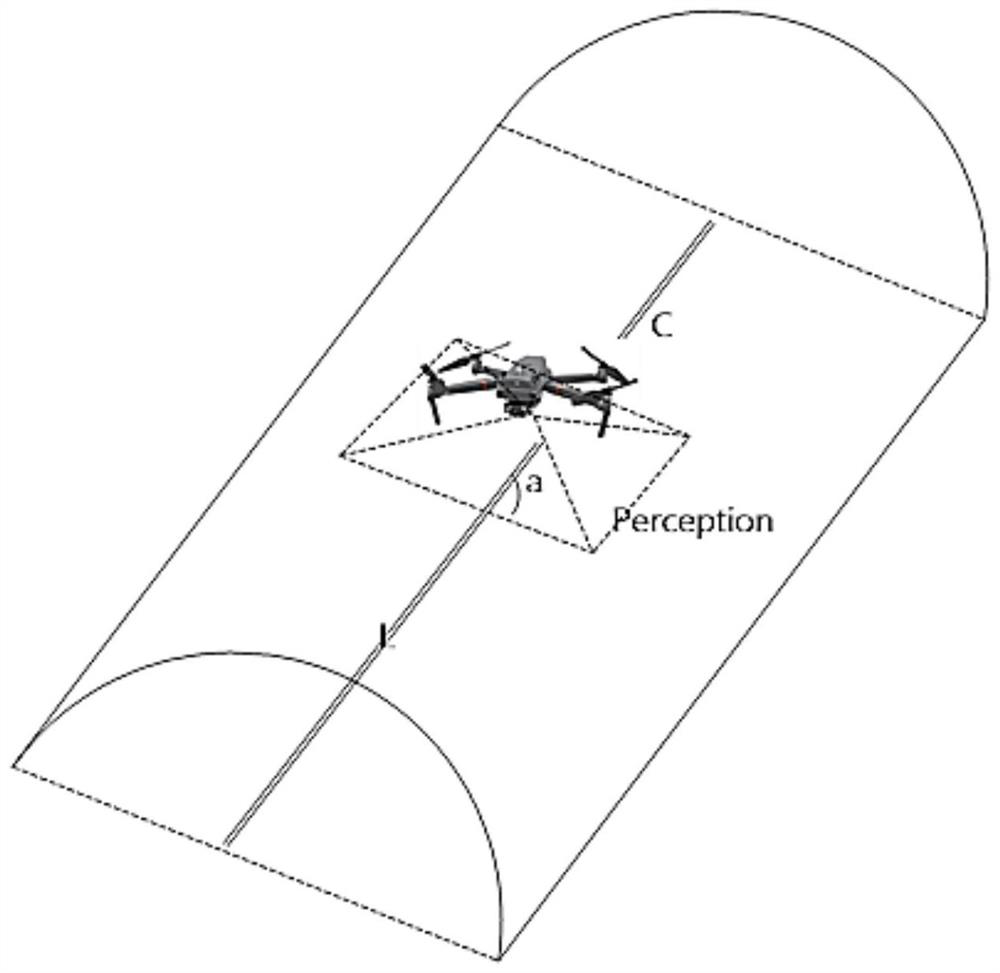
[0061] The heading calibration marker is set at the center of the tunnel floor along the radial direction of the tunnel; figure 2 , the heading calibration marker L is a high-contrast marking line, the width of which is not less than 5 cm, and the length is consistent with the radial length of the tunnel.
[0062] It is worth noting that the size of the course calibration marker used in the preferred embodiment of the present invention is a non-limiting preferred choice, and those skilled in the a...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Width | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More