

Anti-foot-pressing detection method and terminal
A detection method and detection terminal technology, applied in the field of mobile robots, can solve problems such as high misjudgment rate, hidden dangers of normal machine operation, and pedestrian judgment, so as to avoid presser foot accidents and reduce the time for data collection and data processing.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
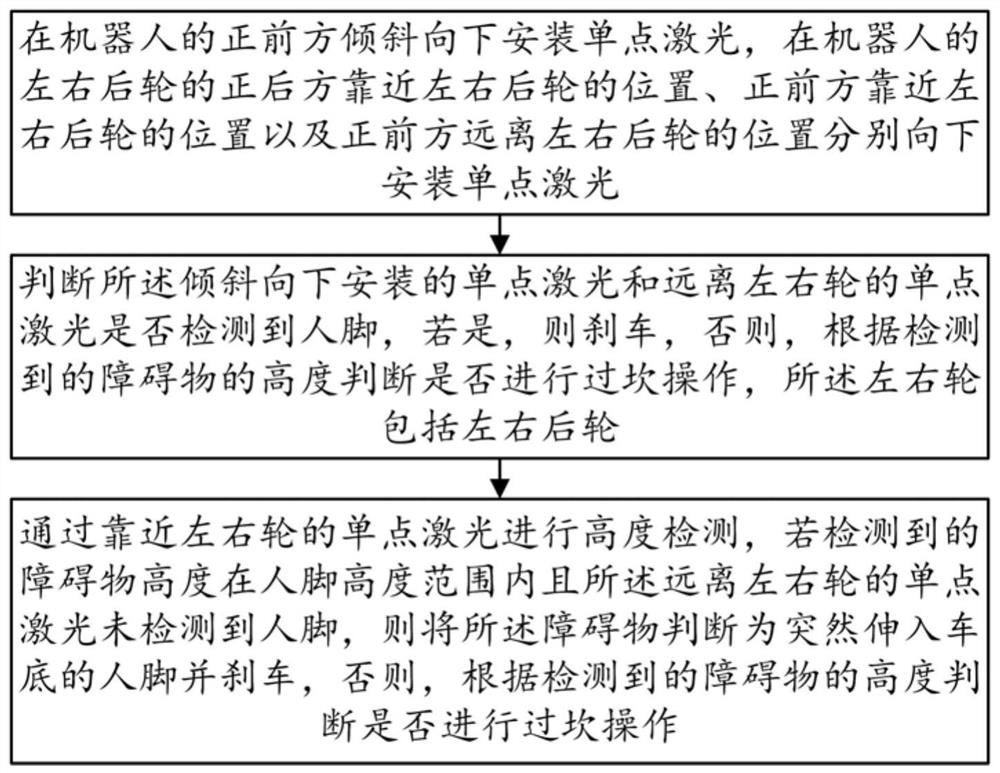
[0067] Please refer to figure 1 , Figure 3 to Figure 7 , a kind of anti-presser foot detection method, comprises steps:
[0068] S1. Install a single-point laser obliquely downwards directly in front of the robot. Directly behind the left and right rear wheels of the robot, the position is close to the left and right rear wheels, the position directly in front is close to the left and right rear wheels, and the position directly in front is away from the left and right rear wheels. Install the single point laser under.
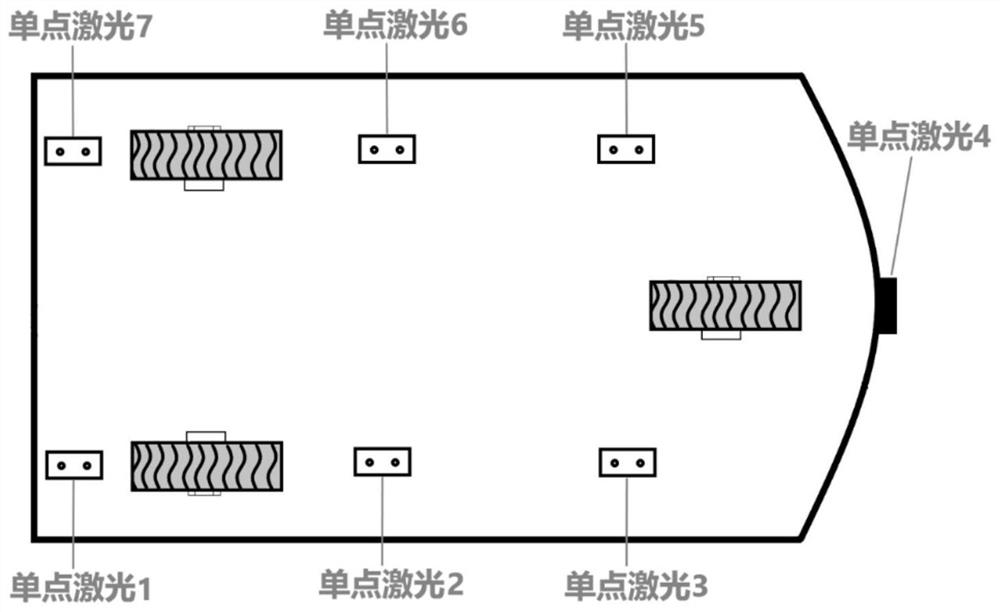
[0069] Specifically, please refer to image 3 , the robot in this embodiment is a three-wheeled robot, then the left and right wheels only include the left and right rear wheels, and the left and right rear wheels include the left rear wheel and the right rear wheel. From the perspective of the left and right positions of the wheels, the left rear wheel can also be called the left wheel, and the right rear wheel can also be called the left wheel. Rear whee...
Embodiment 2
[0095] Please refer to figure 1 , Figure 8 The difference between the present embodiment and the first embodiment is that the present embodiment is a four-wheel robot, and the left and right wheels include the left and right rear wheels and the left and right front wheels, the left and right rear wheels include the left rear wheel and the right rear wheel, and the left and right front wheels include Left front wheel and right front wheel, and from the position of wheel, left rear wheel and left front wheel also can be collectively referred to as left wheel, right rear wheel and right front wheel also can be collectively referred to as right wheel.
[0096] S1', please refer to Figure 8 , install single-point laser 1 directly behind the left rear wheel and close to the left rear wheel; install single-point laser 2 directly in front of the left rear wheel and close to the left rear wheel; install single-point laser 2 behind the left front wheel and close to the left front whe...
Embodiment 3
[0109] Please refer to figure 2 , an anti-presser foot detection terminal, comprising a memory, a processor, and a computer program stored on the memory and operable on the processor, when the processor executes the computer program, one of the first or second embodiments is realized Each step of the anti-presser foot detection method.
[0110] In summary, the present invention provides an anti-presser foot detection method and a terminal. A single-point laser is installed obliquely downwards directly in front of the robot, and is located directly behind the left and right rear wheels, close to the position directly in front of the left and right rear wheels. The position of the left and right rear wheels and the position directly in front away from the left and right rear wheels are respectively installed with single-point lasers downward, and the human feet can be detected by the single-point laser installed obliquely downward and the single-point laser far away from the le...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More