

Unattended oil field metering robot based on image recognition system
A technology of image recognition and robotics, which is applied in the directions of measurement, wellbore/well parts, earthwork drilling and production, etc., can solve the problems of reducing the use efficiency and easily damaged devices, so as to improve the use efficiency, expand the recognition area, improve the service life and efficiency effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
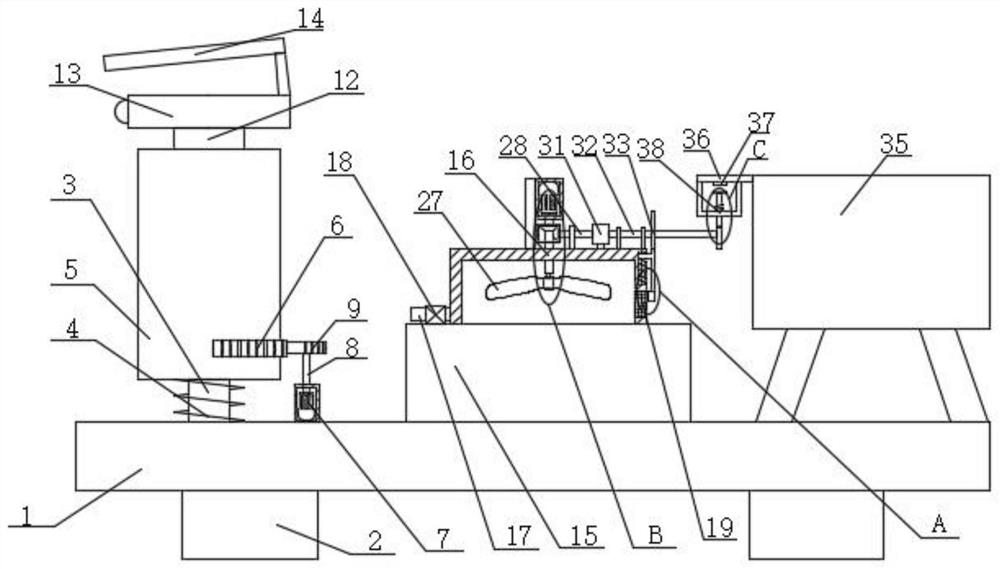
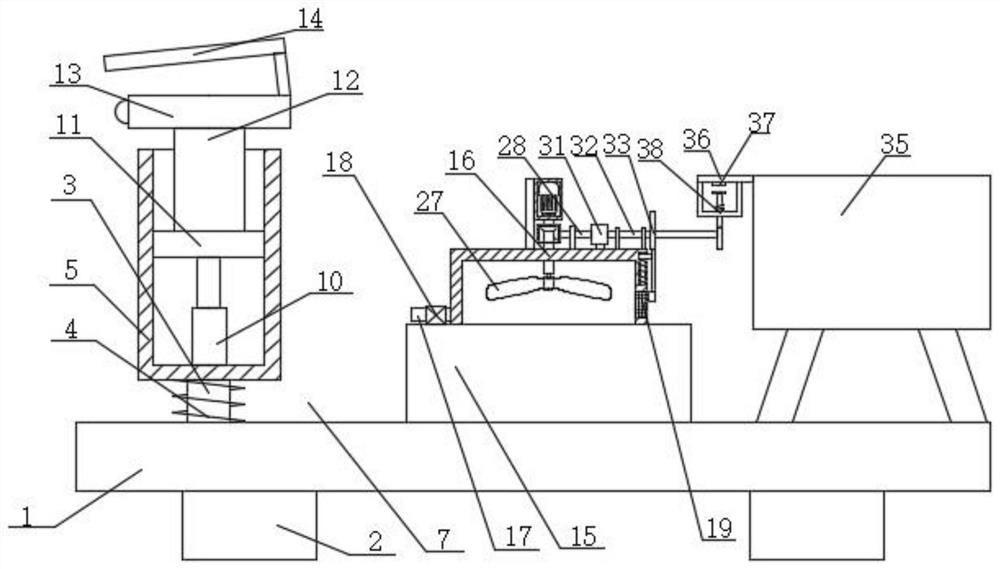
[0028] refer to Figure 1-6 , an unattended oilfield metering robot based on an image recognition system, including a base plate 1, two brackets 2 are symmetrically and fixedly installed on the bottom of the base plate 1, and an installation pipe 5 is installed on the top of the base plate 1 in rotation, and a mounting pipe 5 is fixedly installed on the installation pipe 5 Rack 6, slide plate 11 is installed slidingly in installation tube 5, and the top of slide plate 11 is fixedly installed with support plate 12, and the top of support plate 12 is fixedly installed with camera 13, and the top of camera 13 is fixedly installed with baffle plate 14, and installation pipe 5 An adjustment device is fixedly installed inside, a driving device is fixedly installed on the top of the bottom plate 1, a control box 15 is fixedly installed on the top of the bottom plate 1, an installation cover 16 is fixedly installed on the top of the control box 15, and a filter is fixedly installed on ...
Embodiment 2
[0039] refer to Figure 1-6 , an unattended oilfield metering robot based on an image recognition system, including a base plate 1, two brackets 2 are symmetrically and fixedly installed on the bottom of the base plate 1, and an installation pipe 5 is installed on the top of the base plate 1 in rotation, and a mounting pipe 5 is fixedly installed on the installation pipe 5 Rack 6, slide plate 11 is installed slidingly in installation tube 5, and the top of slide plate 11 is fixedly installed with support plate 12, and the top of support plate 12 is fixedly installed with camera 13, and the top of camera 13 is fixedly installed with baffle plate 14, and installation pipe 5 An adjustment device is fixedly installed inside, a driving device is fixedly installed on the top of the bottom plate 1, a control box 15 is fixedly installed on the top of the bottom plate 1, an installation cover 16 is fixedly installed on the top of the control box 15, and a filter is fixedly installed on ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More