

Target detection method and device, electronic equipment and storage medium
A target detection and target technology, which is applied in the field of data processing, can solve problems such as inapplicability and slow point cloud feature extraction speed, and achieve the effect of ensuring accuracy and improving extraction speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
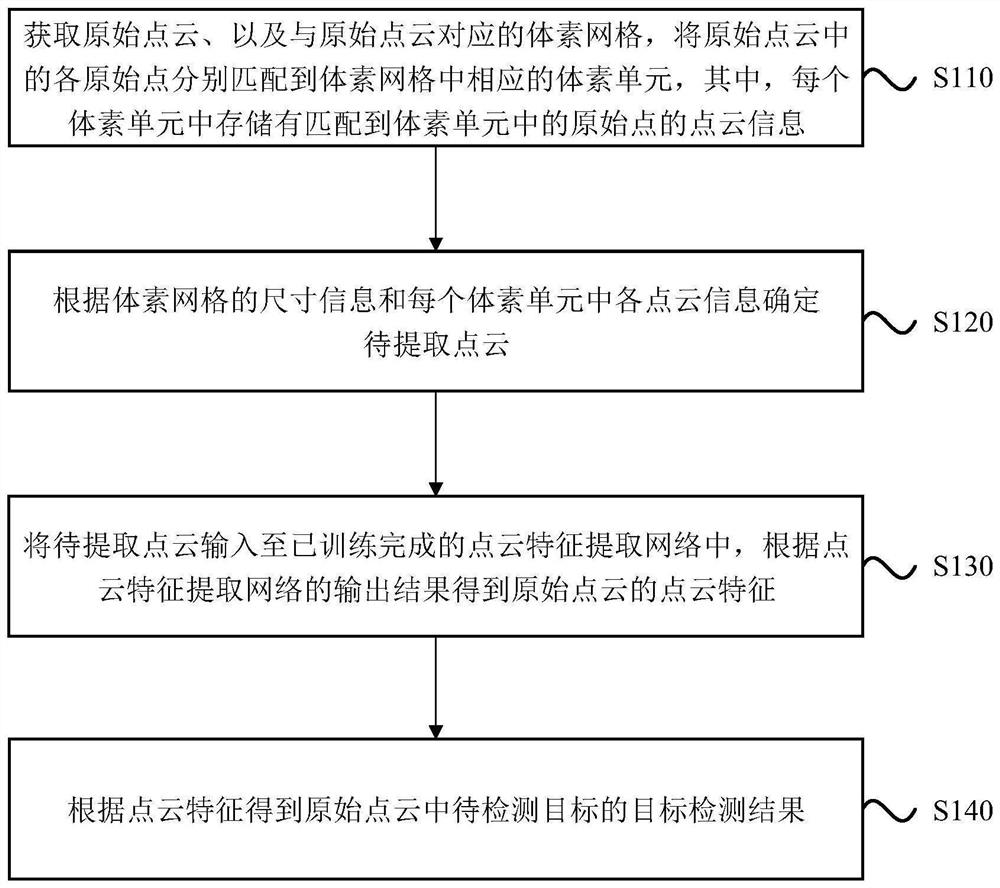
[0042] figure 1 It is a flow chart of a target detection method provided in Embodiment 1 of the present invention. This embodiment is applicable to the situation of rapidly extracting point cloud features, especially suitable to the situation of combining voxelization and point cloud information to quickly and accurately extract point cloud features. The method can be executed by the target detection device provided by the embodiment of the present invention, the device can be realized by software and / or hardware, and the device can be integrated on an electronic device, and the electronic device can be integrated in an automatic driving vehicle.
[0043] see figure 1 , the method of the embodiment of the present invention specifically includes the following steps:
[0044] S110. Obtain the original point cloud and the voxel grid corresponding to the original point cloud, and match each original point in the original point cloud to the corresponding voxel unit in the voxel g...
Embodiment 2
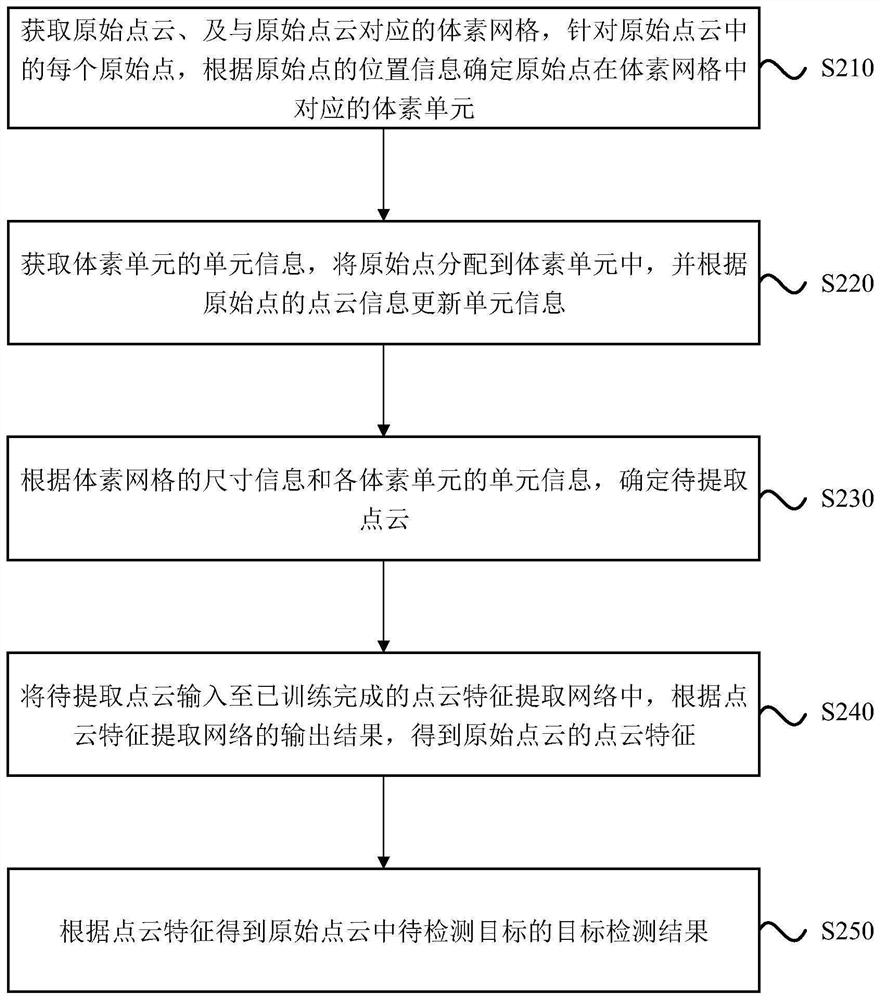
[0058] figure 2 It is a flowchart of a target detection method provided in Embodiment 2 of the present invention. This embodiment is optimized on the basis of the above-mentioned technical solutions. In this embodiment, optionally, matching each original point in the original point cloud to the corresponding voxel unit in the voxel grid may specifically include: for each original point in the original point cloud, according to the original The position information of the point determines the corresponding voxel unit of the original point in the voxel grid; obtains the unit information of the voxel unit, assigns the original point to the voxel unit, and updates the unit information according to the point cloud information of the original point; The point cloud to be extracted is determined according to the size information of the voxel grid and the point cloud information in each voxel unit, which may specifically include: determining the point to be extracted according to th...
Embodiment 3
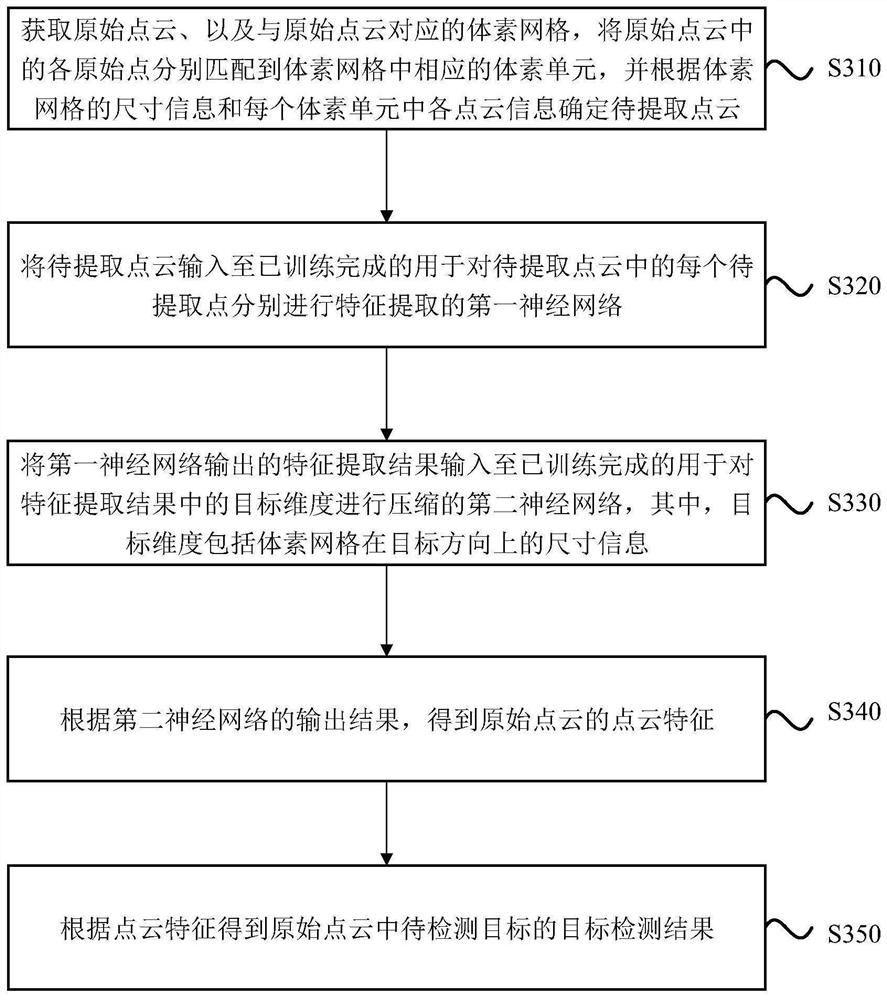
[0075] image 3 It is a flowchart of a target detection method provided in Embodiment 3 of the present invention. This embodiment is optimized on the basis of the above-mentioned technical solutions. In this embodiment, optionally, inputting the point cloud to be extracted into the trained point cloud feature extraction network may include: inputting the point cloud to be extracted into the trained point cloud for the point cloud to be extracted The first neural network for feature extraction for each point to be extracted; the feature extraction result output by the first neural network is input to the trained second neural network for compressing each feature extraction result on the target dimension, The target dimension includes the size information of the voxel grid in the target direction; correspondingly, according to the output result of the point cloud feature extraction network, the point cloud feature of the original point cloud can be obtained, which can include: ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More