AGV navigation communication system and method in non-wireless scene
A wireless scene and communication system technology, applied in the field of AGV dispatching communication, to achieve the effect of information security
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
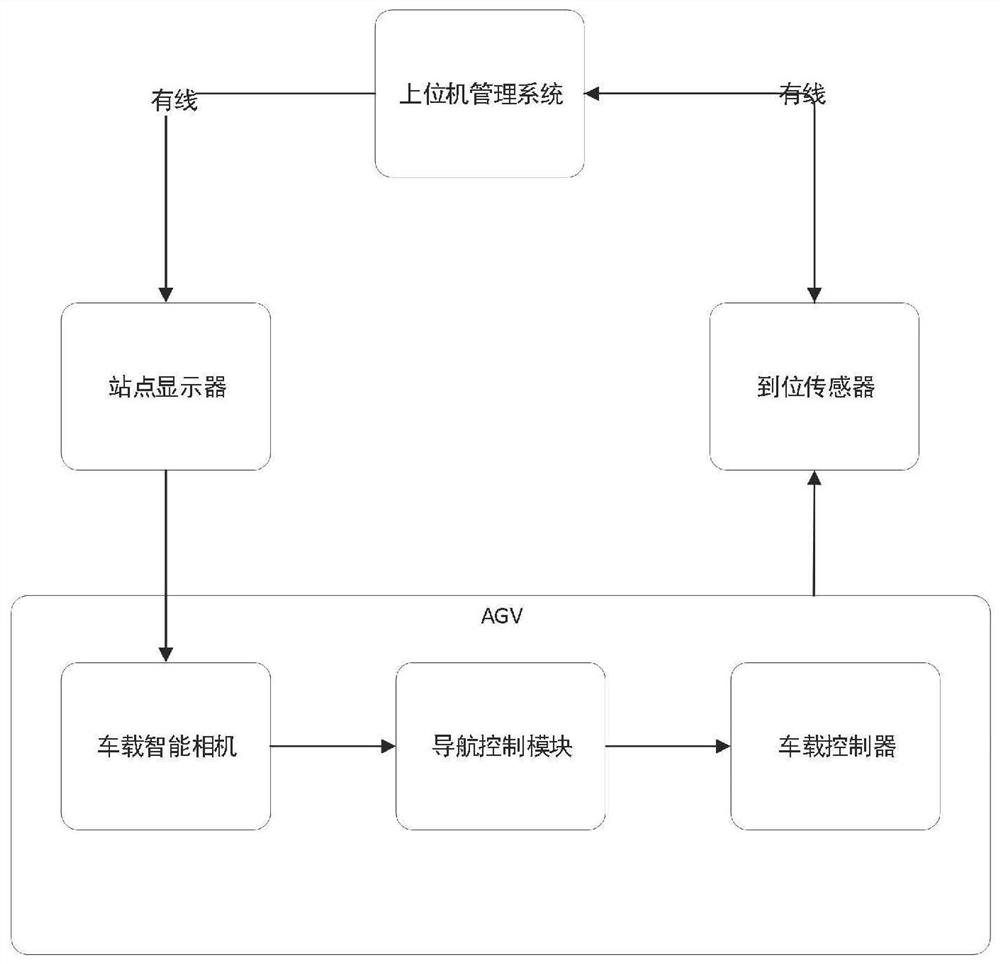
[0044] The present embodiment proposes AGV navigation and communication system in a non-wireless scenario, the system includes a management host computer system, a navigation control module, a display station, place sensors, onboard camera, onboard controller, AGV. The site does not belong to the system, but can be set when creating the map.
[0045] Specific functions of each module are as follows:
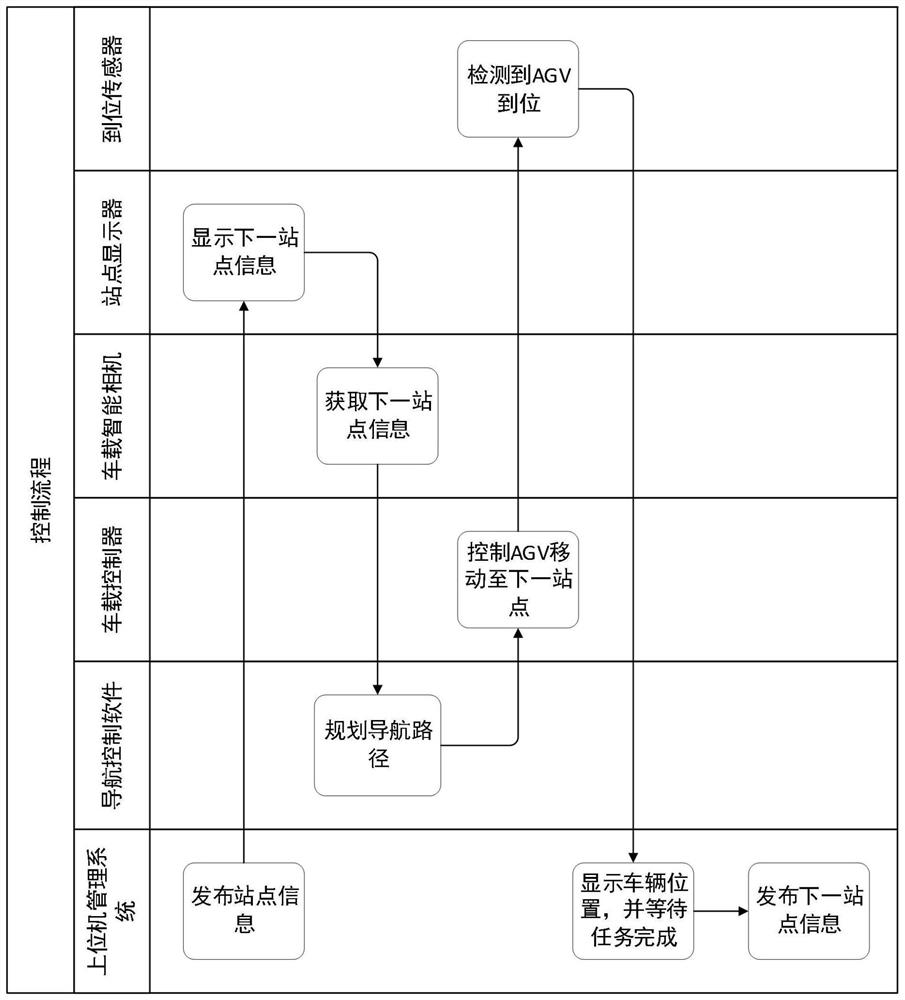
[0046] PC management system is responsible for the assigned task AGV release, go to a site such as AGV designated delivery service carried out in accordance with the operation of the equipment package.
[0047] A navigation control module station for receiving an instruction issued by the PC management system, according to an instruction of the target site for real-time control AGV does not move off course, an obstacle avoidance path planning in accordance with a final target site path.
[0048] Disposed at a predetermined position within a predetermined site of the scene, the monito...
Embodiment 2
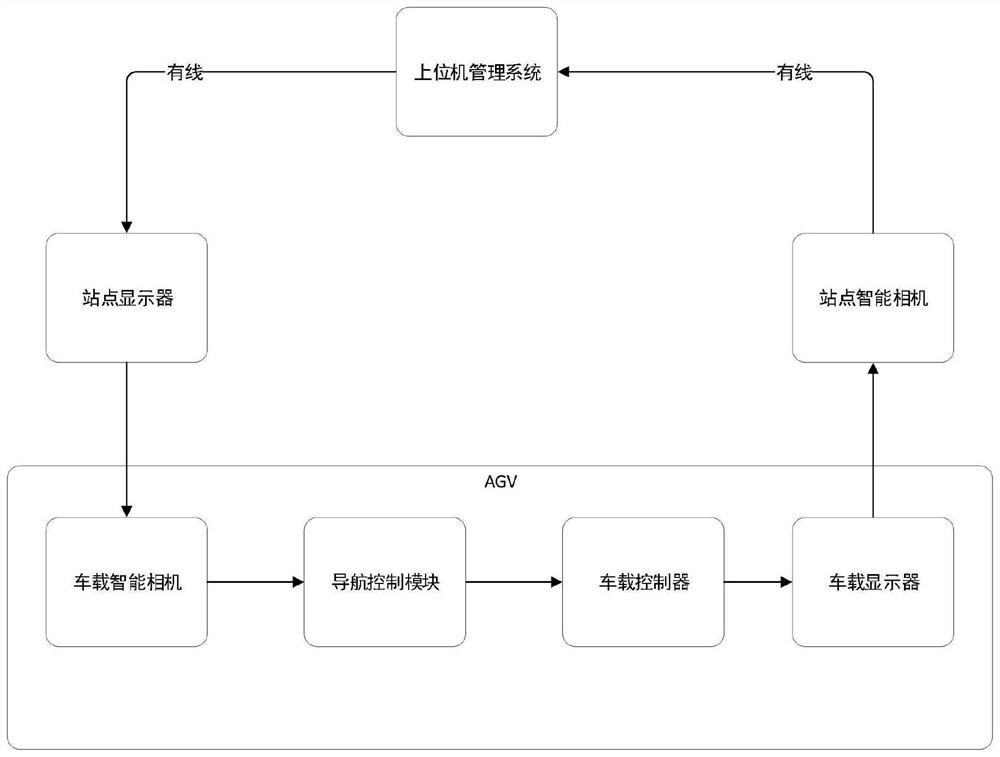
[0083] Example a PC management system can be found in the site information transmitted via the site display and on-board camera of this transmission, but the state information of the AGV can not be transmitted to the host computer management system, real-time process to solve these problems, the new On-board monitor with the site instead of the camera sensor in place.
[0084] The present embodiment proposes AGV navigation and communication system in a non-wireless scenario, the system includes a management host computer system, a navigation control module, a display site, site cameras, car cameras, car display, car controller, AGV.
[0085] PC management information system for AGV or other devices to send tasks.
[0086] Navigation control means for receiving task information management system of the host computer, and generates a path of travel of the AGV, AGV control according to generate a route to be movable.
[0087] A display attached to the site or sites near the ground st...
Embodiment 5
[0163] The present invention can be applied laser navigation is based on the natural contours of the principle of the SLAM navigation. SLAM i.e. simultaneous localization and map building, refers to the unknown environment, the robot through the interior of the sensor itself carried by (an encoder, an IMU, etc.) and external sensors (laser sensor, or visual sensor) to locate itself, and positioned external sensor on the basis of environment information acquired incremental build environment map. In the map building process by laser sensor in the environment surrounding natural contour of the object (such as walls, pillars or other fixed objects) detecting, learning, including information on the distance, angle, rate reflected by the object, and then by SLAM algorithm to achieve positioning navigation mobile robot.
[0164] The present embodiment proposes AGV navigation and communication system in a non-wireless scenario, the system includes a management host computer system, a nav...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com