

Unmanned aerial vehicle landing platform, identification method, landing method and flight operation system
A technology of landing platform and identification method, applied in control/regulation systems, non-electric variable control, instruments, etc., can solve the problems of easy deviation of landing position, inability to obtain the full picture of the pattern, deviation of the position of the drone, etc., and achieve the landing process. Stable and reliable, simple and reliable calculation results, and sufficient prior information
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
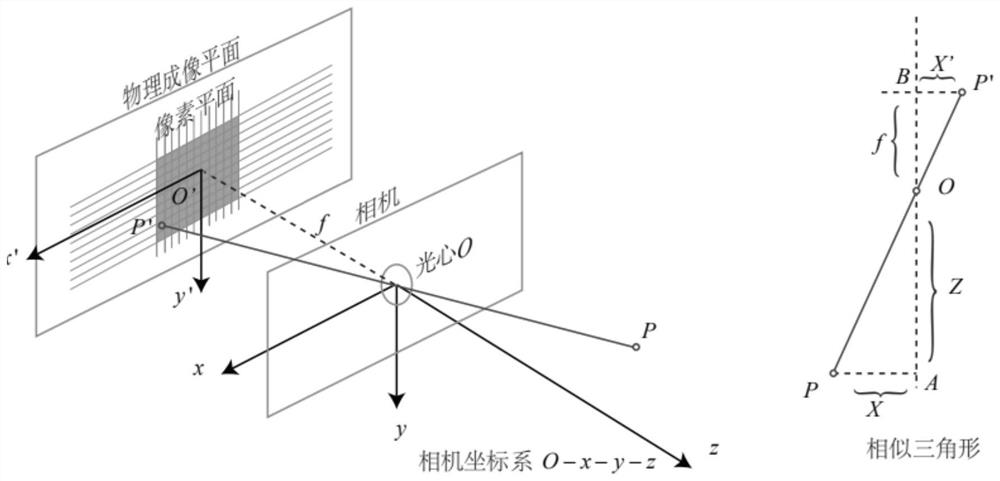
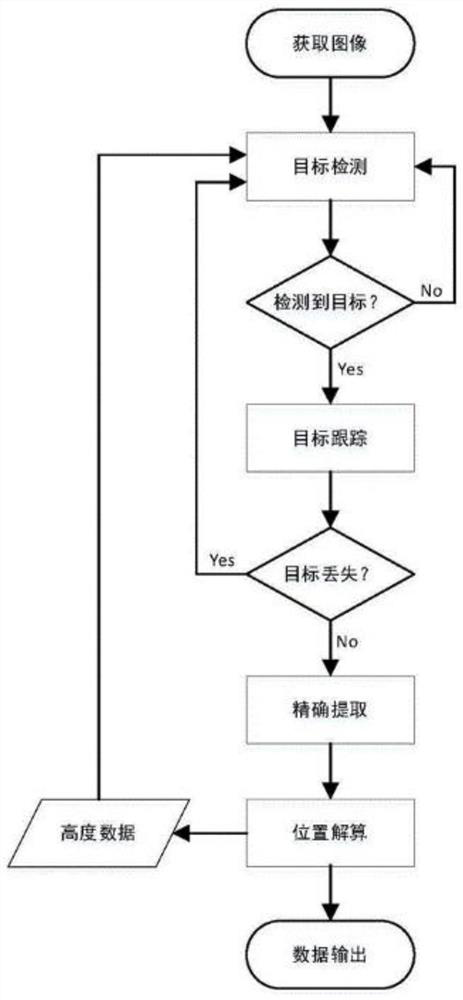
[0056] This embodiment discloses a method for landing an unmanned aerial vehicle. The method includes the steps of collecting images, identifying the landing platform from the collected images, and calculating the relative pose data between the unmanned aerial vehicle and the detected landing platform. Steps, the step of calculating landing navigation information according to the relative pose data, and the step of controlling the UAV to land under the guidance of the landing navigation information.
[0057] The UAV flies normally according to the planned navigation information, and collects the image below after flying to the effective area above the landing point, or after receiving the landing command.
[0058] The so-called landing point is a destination position set in the navigation information. The so-called effective area above the landing point refers to the predetermined height above the landing point. The height h of the UAV is determined comprehensively by the inte...
Embodiment 2
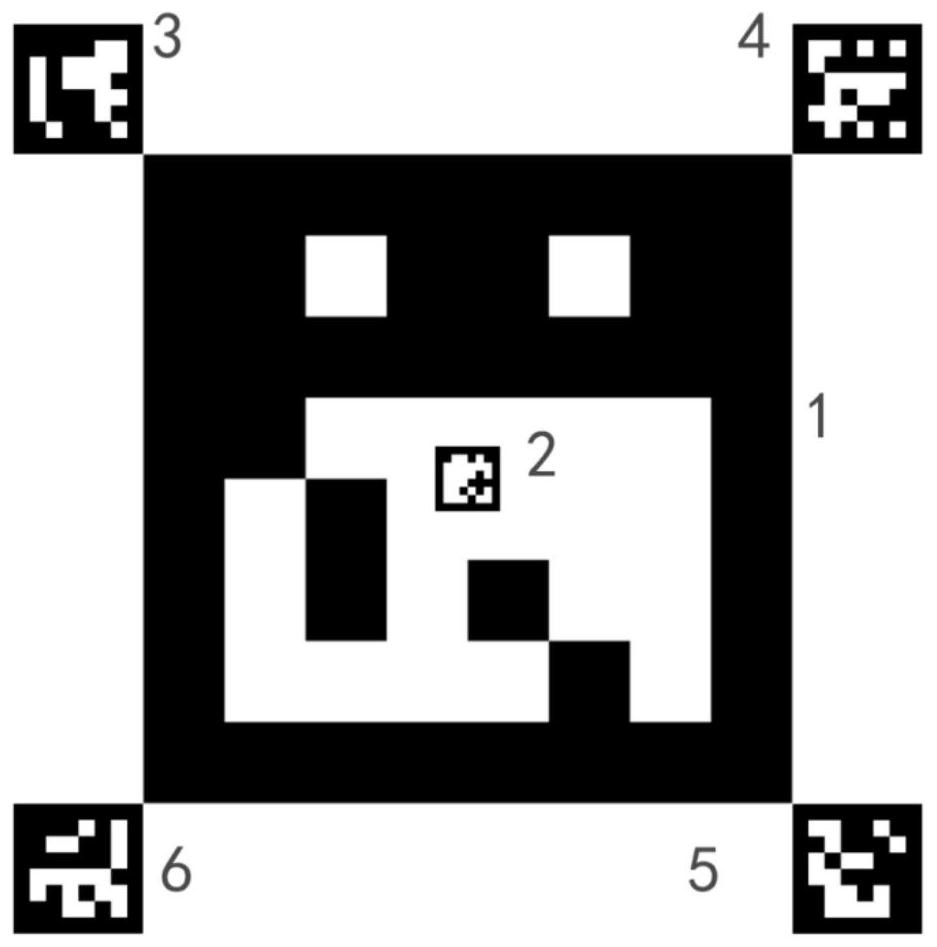
[0104] This embodiment discloses another method for guiding drones to land based on multi-size and nested patterns. This method is generally the same as the method in Embodiment 1, the only difference is that the unique identification The design is not to design with color blocks, but to configure link addresses for each QR code, pointing to a unique logo.
Embodiment 3
[0106] Cameras, radars, IMU (inertial navigation equipment), GPS (global positioning equipment), positioning and navigation equipment, onboard computer, flight control computer, etc. are installed on the UAV. (mav_link) communicates with the flight control computer through the serial port (mavros), and sends flight instructions (such as take-off navigation information, planning navigation information, landing navigation information, etc.) to the flight control computer through the serial port to realize autonomous flight and landing.
[0107] The camera, onboard computer, sub-control computer and landing platform designed with multi-size and nested patterns on the UAV constitute a system to guide the UAV to land.
[0108] The drone flies normally according to the planning navigation information. During the normal flight, the camera is turned off, and the flight of the drone is guided by RTK (Real-time kinematic, real-time differential positioning). After the UAV flies to the e...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More