

Redundant-degree-of-freedom mechanical arm path planning method and device and engineering machinery
A technology of path planning and manipulators, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as the inability to reduce the vibration at the end of the manipulator arm execution, and achieve the effect of reducing jitter and reducing the number of joints
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] Specific embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings. It should be understood that the specific embodiments described here are only used to illustrate and explain the present invention, and are not intended to limit the present invention.
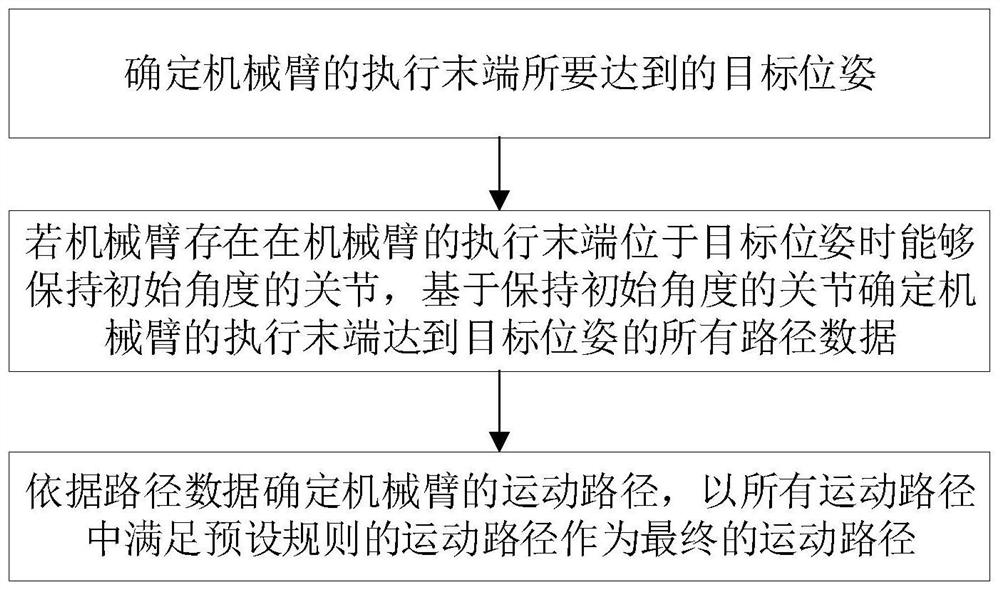
[0049] Such as figure 1 As shown, in the first aspect of this embodiment, a path planning method for a redundant degree of freedom robotic arm is provided, including:
[0050]Determine the target pose to be achieved by the execution end of the manipulator; determine the joints that can maintain the initial angle when the execution end of the manipulator is at the target pose among all the joints of the manipulator; determine the execution end of the manipulator based on the determined joints To achieve the path data of the target pose, the path data includes the target angles of all joints of the manipulator, and the target angle of at least one joint is equal ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More