

Mine steel wire rope dust and dirt removing robot and working method
A steel wire rope and robot technology, applied in the field of dust removal robots, can solve the problems of low dust removal efficiency of steel wire ropes, affecting the detection results of steel wire ropes, major hidden dangers of mine safety, etc., to prevent motor jamming, save manpower, and high cleaning efficiency Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] specific implementation plan
[0042] The present invention will be further described below in conjunction with the accompanying drawings.
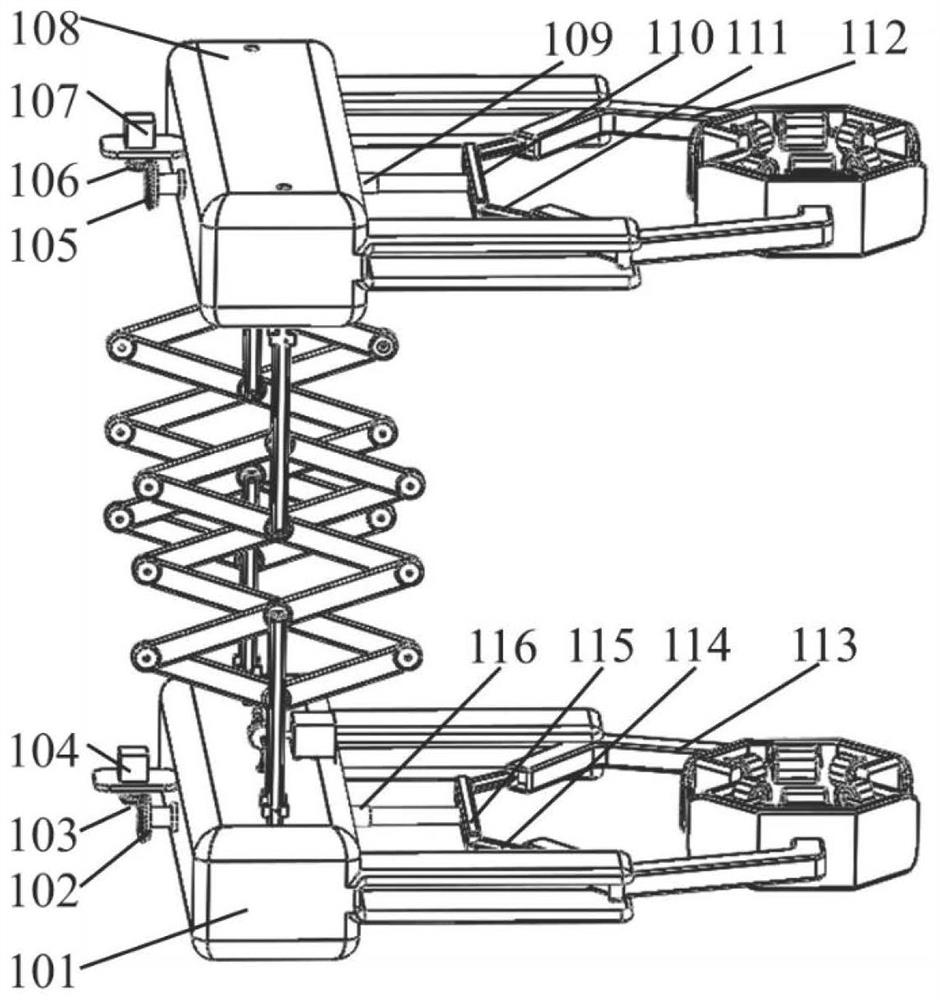
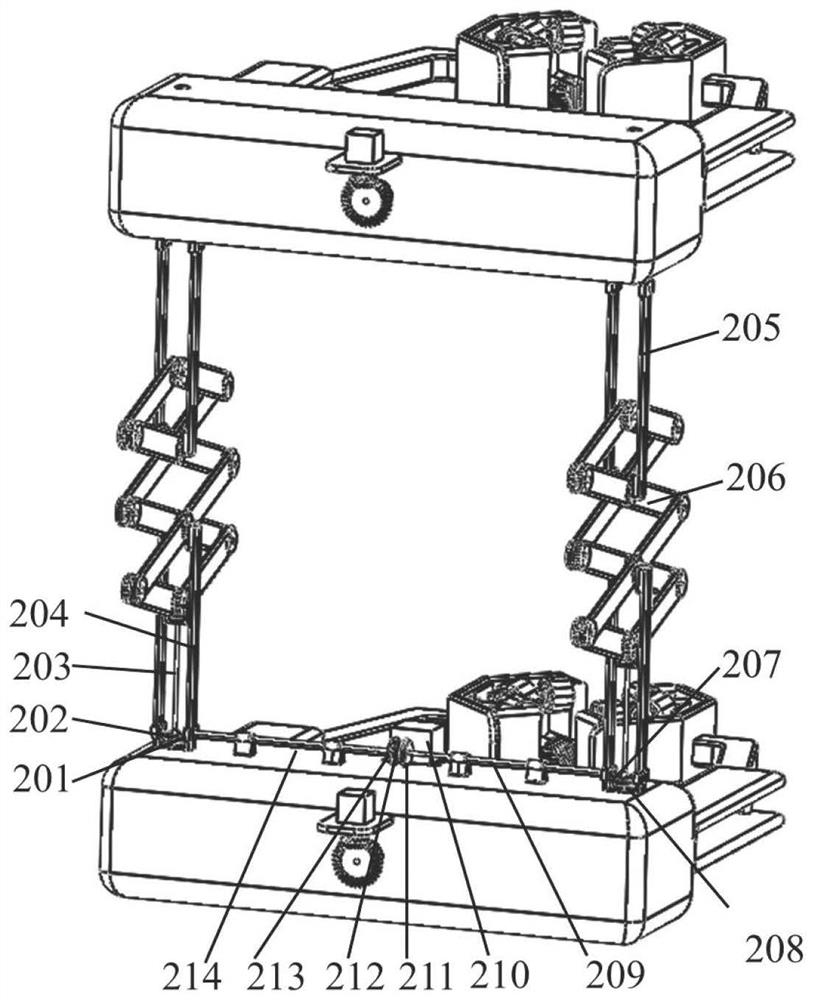
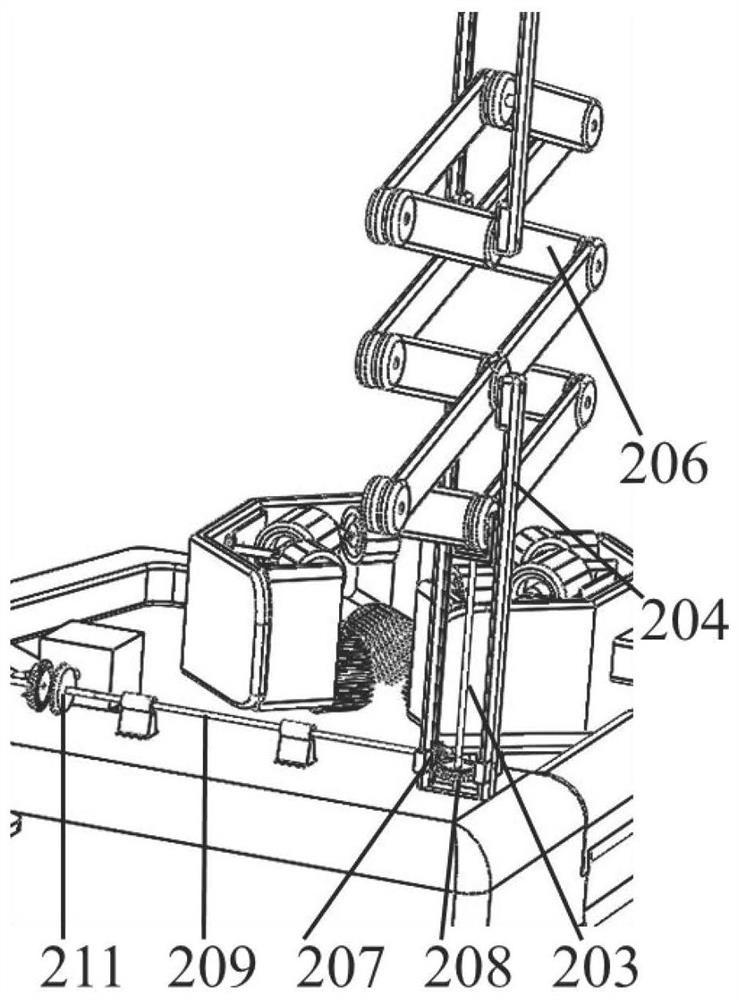
[0043] Such as figure 1 , Figure 9 with Figure 10 As shown, a mine steel wire rope dust removal robot and its use method meet the requirements of climbing and dust removal for mine steel wire ropes, and can realize efficient and non-destructive dust removal for steel wire ropes. The invention discloses a mine steel wire rope dust removal robot, which includes a tightening device, a lifting device, a dust removal device and a driving device; The upper clamp 112 for clamping the mine steel wire rope, and the lower clamping device is provided with the lower clamp 113 for clamping the mine steel wire rope. Through the cooperation of the upper and lower clamping devices, the robot can hold the steel wire rope tightly; Between the lower holding devices, when working, adjust the distance between the upper holding device and the lowe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More