Trajectory planning method based on numerical filtering
A trajectory planning and numerical filtering technology, which is applied in the direction of instruments, computer control, simulators, etc., can solve complex problems such as solving high-order fitting functions, and achieve optimal trajectory distance and time consumption, optimal path distance and time consumption, and calculation Simple and flexible process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] In order to have a clearer understanding of the technical features, purposes and effects of the present invention, the specific implementation manners of the present invention will now be described in detail with reference to the accompanying drawings.
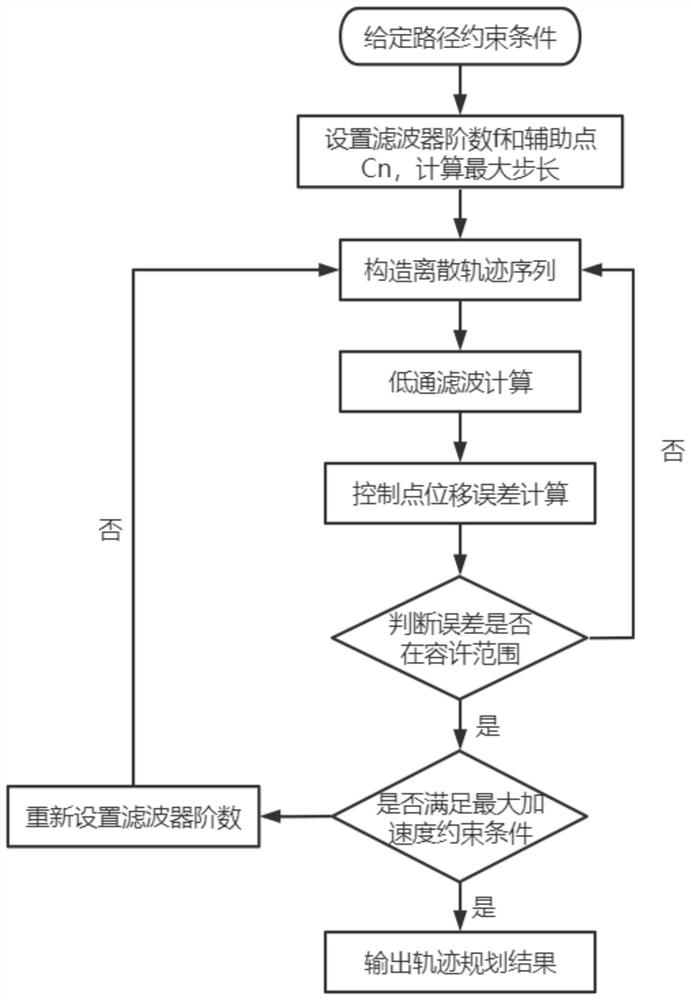
[0043] Such as figure 1 As shown, the present invention provides a trajectory planning method based on numerical filtering, comprising the following steps:
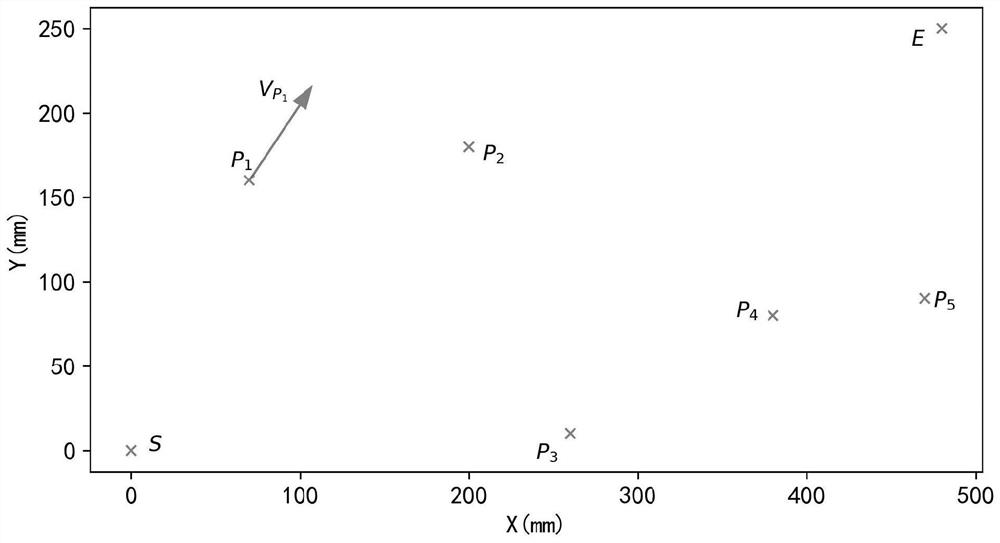
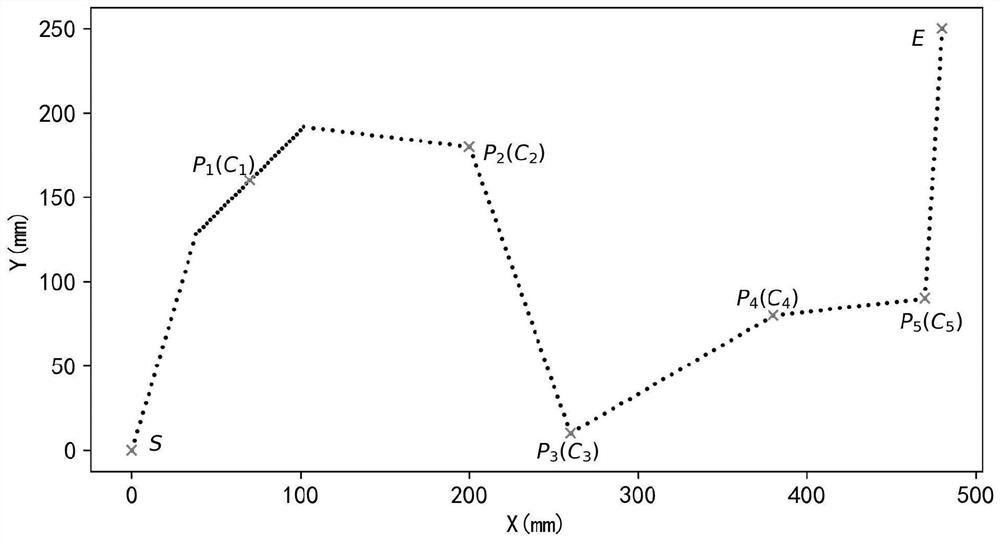
[0044] S1. Set the constraint conditions of trajectory planning, including the starting point S and control point sequence P that the trajectory passes through in sequence n and the coordinate values of the end point E and the velocity and acceleration conditions at each coordinate point, the maximum velocity V of the trajectory max , the maximum acceleration a max Constraints, trajectory discretization time period T.
[0045] The constraints and trajectories are described by a coordinate system including three-dimensional space coordinates and one-dimensional...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com