Path planning method and system for realizing automatic inspection of fan based on unmanned aerial vehicle
A path planning and unmanned aerial vehicle technology, applied in the direction of control/adjustment system, non-electric variable control, vehicle position/route/height control, etc., can solve the problems of low efficiency and cost, liberate labor force and improve inspection operations efficiency effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0101] The present invention and patent are described and illustrated in detail below in conjunction with the accompanying drawings and specific implementation steps:
[0102] The present invention comprises the following steps:
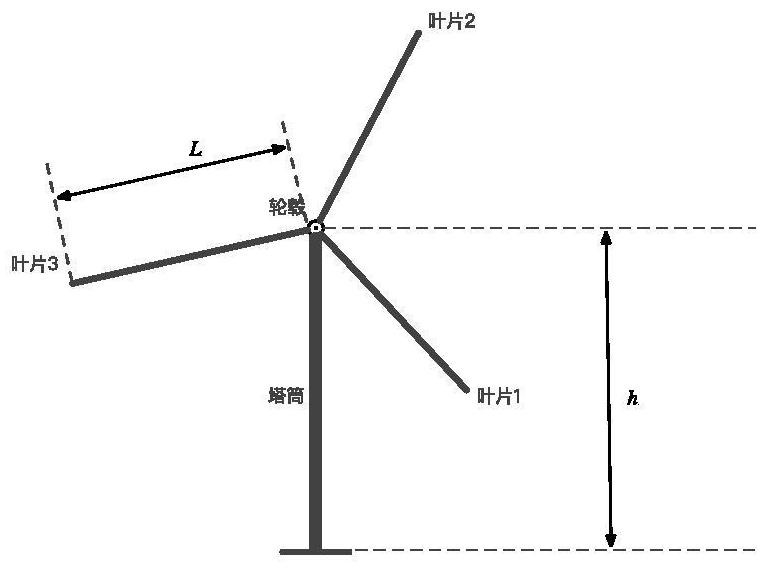
[0103] (1) Establish and import the fan model parameters as an input parameter of the path planning algorithm;
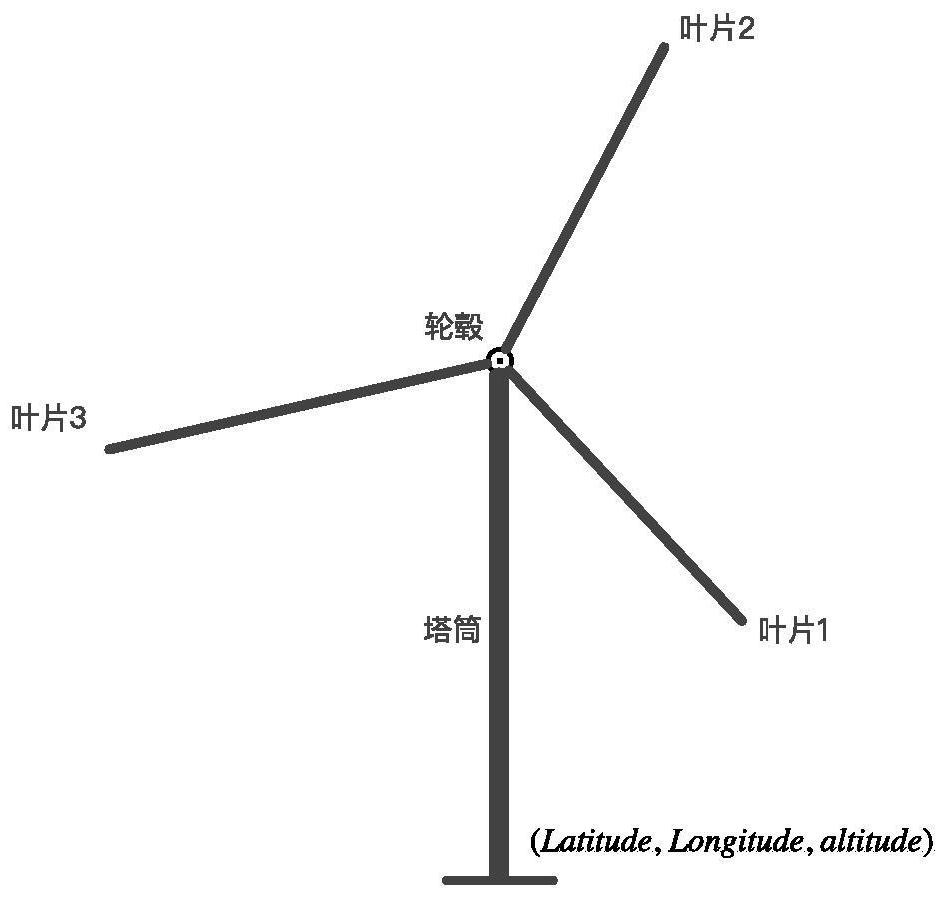
[0104] (2) Measure the coordinates of the installation position of the fan, and use RTK equipment to collect and measure the coordinates of the installation position of the fan;
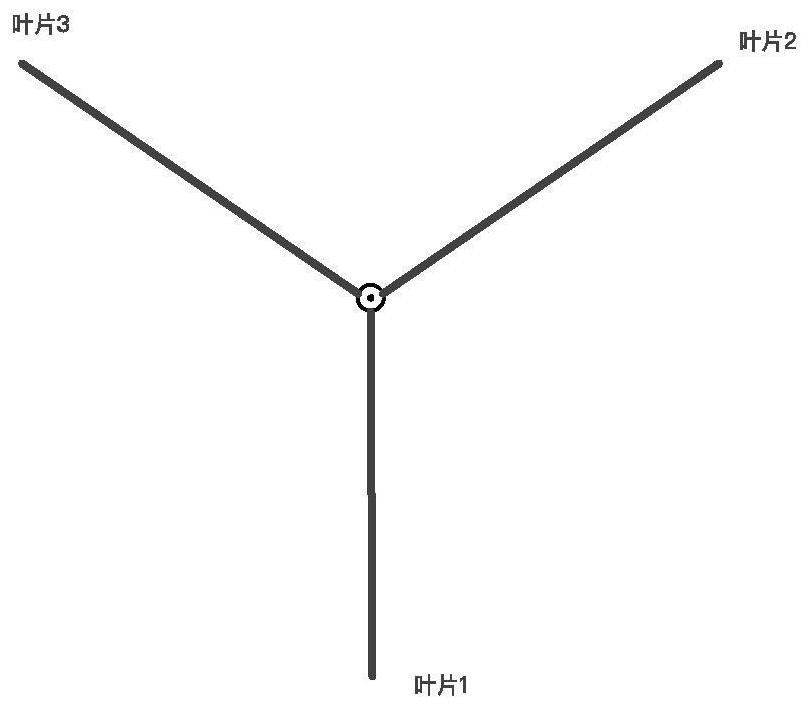
[0105] (3) Calculate the flight path that can capture the direction of the fan blade and process it;
[0106] (4) Calculate the flight path that can capture the rotation angle of the fan blade and process it;
[0107] (5) Calculate the flight path that can completely obtain the image data of the fan blade;
[0108] (6) the flight path that step (3)~(5) obtains is converted into KML file;
[0109] (7) Use the M300RTK to execute the flight path.
[0110] Step ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com