Wheel type docking robot speed matching control system and method based on force feedback
A speed matching and control system technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve the problem of large force on the vehicle docking module, and achieve the effect of reducing the probability of breakage, improving speed matching, and enhancing adaptability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0038] Embodiment 1 of the present disclosure introduces a speed matching control system for a wheeled docking robot based on force feedback.
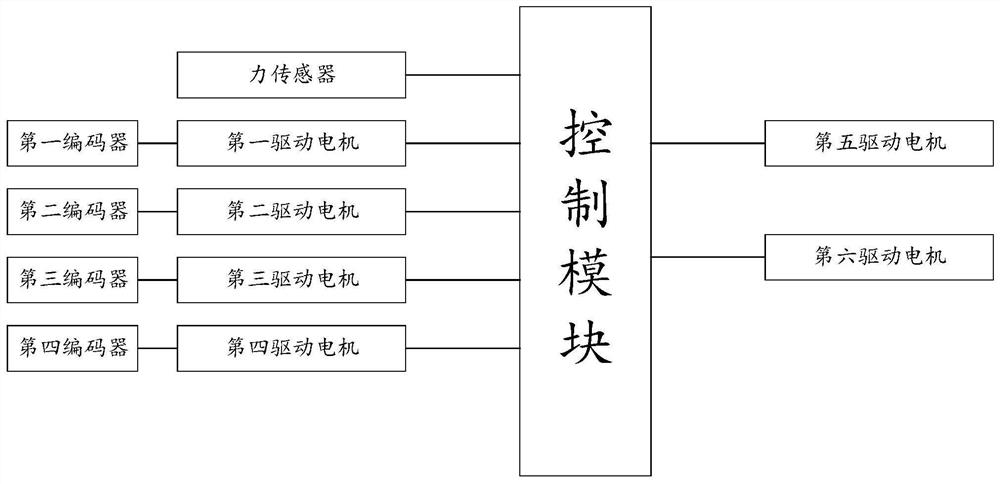
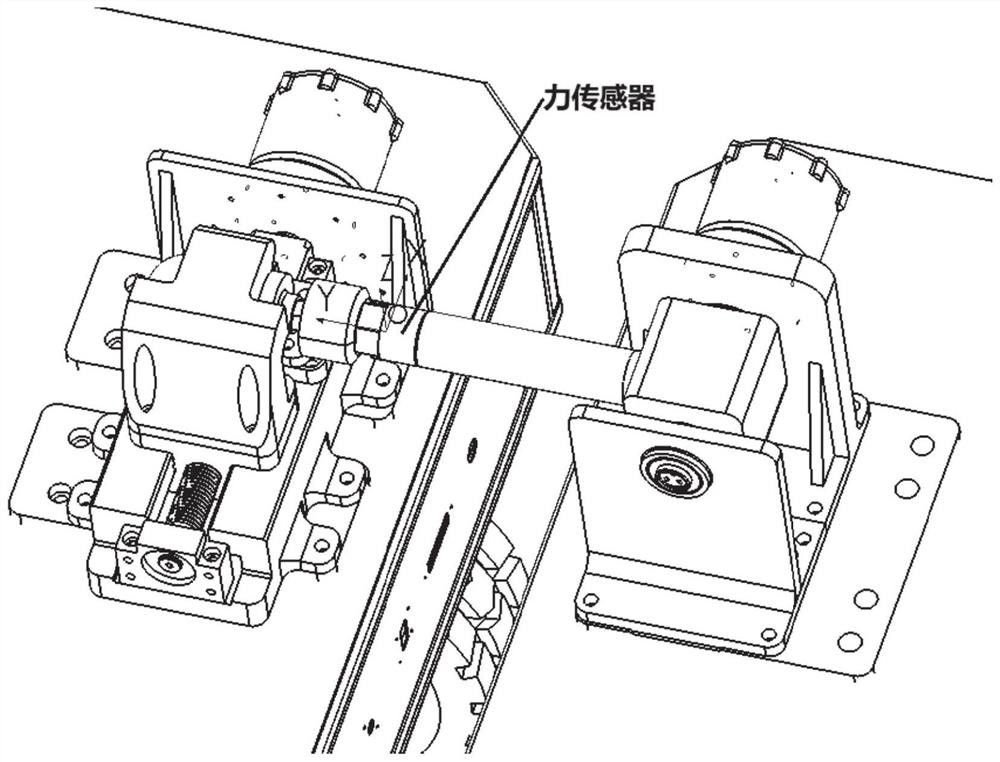
[0039] Such as figure 1 , figure 2 with image 3 The speed matching control system of a wheeled docking robot based on force feedback includes a control module, a wheeled vehicle body connected to the control module, and a vehicle-mounted docking module arranged on the wheeled vehicle body; wherein, the vehicle-mounted docking The module includes an active docking sub-module and a passive docking sub-module respectively arranged at both ends of the wheeled vehicle body; the active docking sub-module includes a fixing device and a rotating link connected to the fixing device, and the rotating connecting rod is provided with a force Sensor; the passive docking sub-module adopts a locking mechanism matching the connecting rod; the center of the wheeled vehicle body is provided with an inertial measurement unit connected to the control ...
Embodiment 2
[0041] Embodiment 2 of the present disclosure introduces a speed matching control method for a wheeled docking robot based on force feedback, and adopts the speed matching control system for a wheeled docking robot based on force feedback introduced in Embodiment 1.
[0042] Such as Figure 4 A speed matching control method for a wheeled docking robot based on force feedback is shown, including the following steps:
[0043] Collect the running state data of each wheeled docking robot after docking, and judge whether each wheeled docking robot is in a motion state according to the obtained running state data;
[0044] When the wheeled docking robots are in motion, obtain the return value of the pulling force between the wheeled docking robots; otherwise, continue to collect the number of running states of each wheeled docking robot after docking;
[0045] Determine whether the return value of the pulling force exceeds the dead zone range, and when it exceeds, calculate the expec...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com