

Unmanned aerial vehicle line patrol intelligent algorithm
An intelligent algorithm and unmanned aerial vehicle technology, applied in the field of power system line inspection, can solve the problems of large amount of calculation, inability to guarantee the principle of integrity and order of line node selection, low efficiency, etc., to achieve accurate automatic line inspection, Realize the effect of automatic line inspection
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The accompanying drawings are for illustrative purposes only and cannot be construed as limiting the patent;
[0025] In order to better illustrate this embodiment, some parts in the drawings will be omitted, enlarged or reduced, and do not represent the size of the actual product;
[0026] For those skilled in the art, it is understandable that some well-known structures and descriptions thereof may be omitted in the drawings.
[0027] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and embodiments.
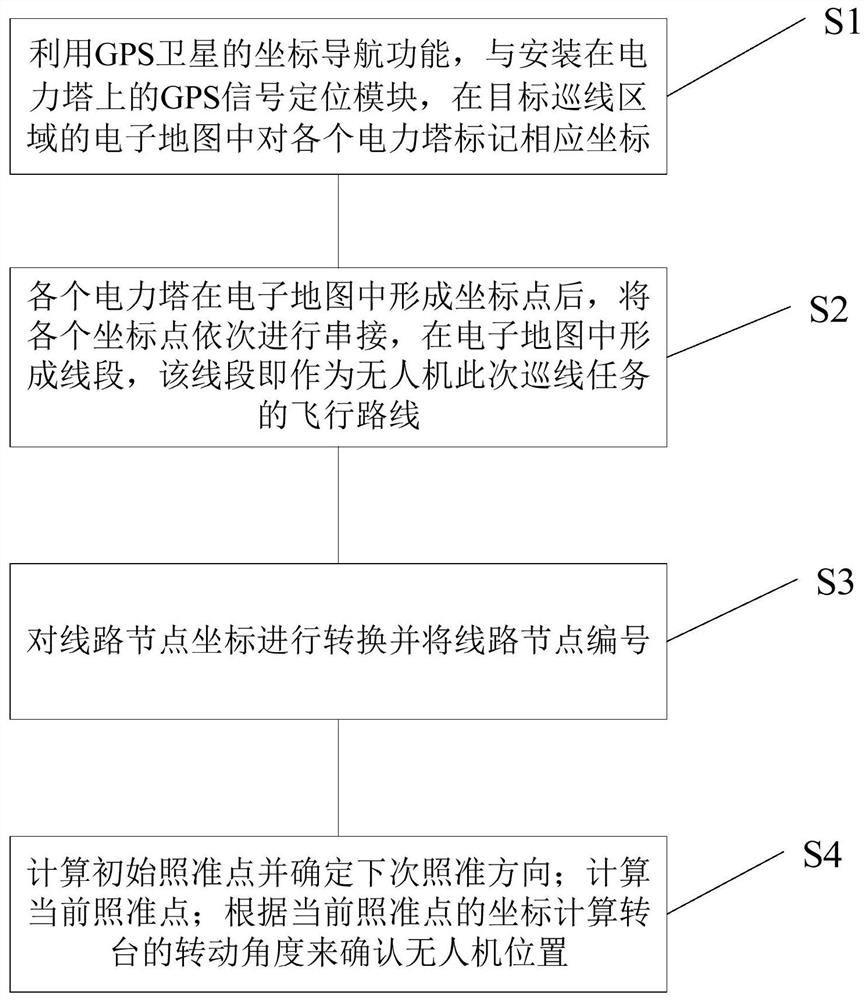
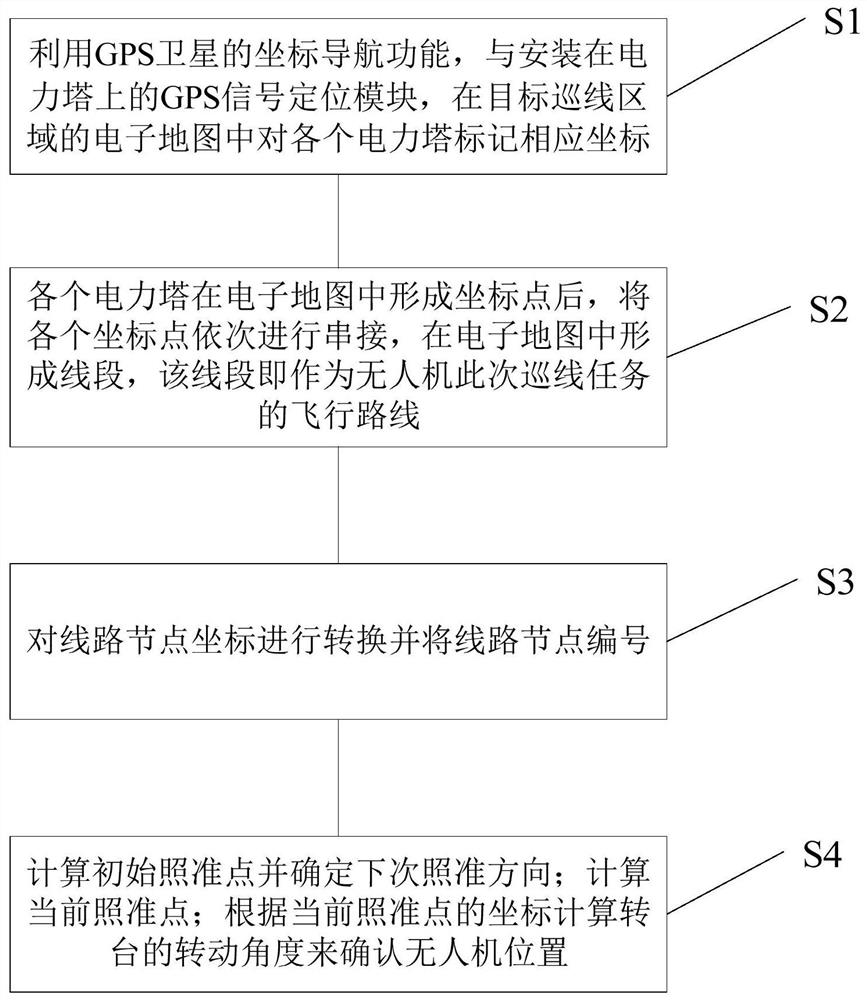
[0028] Such as figure 1 As shown, an intelligent algorithm for UAV line inspection includes the following steps:
[0029] S1: Use the coordinate navigation function of GPS satellites and the GPS signal positioning module installed on the power tower to mark the corresponding coordinates of each power tower on the electronic map of the target patrol area;
[0030] S2: After each power tower f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More