

Automatic inspection method of UAV based on line coordinate sequence
A coordinate sequence, automatic inspection technology, applied in inspection time patrols, navigation calculation tools, etc., can solve problems such as low efficiency, inability to guarantee the principle of integrity and order of line node selection, and large amount of calculation. Work intensity, realize automatic line inspection, and improve work efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0018] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the drawings in the embodiments of the present invention.
[0019] The present invention provides an automatic inspection method for unmanned aerial vehicles based on the line coordinate sequence. The transmitted flight data automatically calculates the angle that the photoelectric pod needs to rotate, and automatically sends this angle to the flight controller, so as to effectively reduce the work intensity of ground station operators, improve the working efficiency of the UAV system, and realize automatic line inspection. Purpose.
[0020] The present invention will be described in further detail below in conjunction with examples and specific implementation methods.
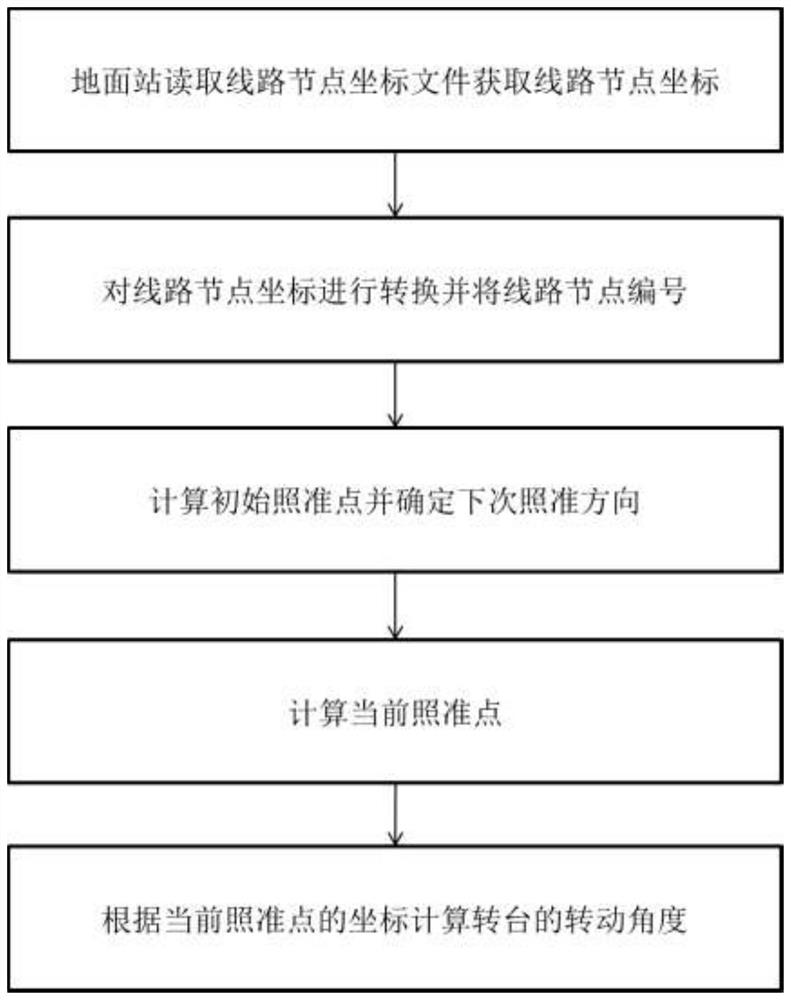
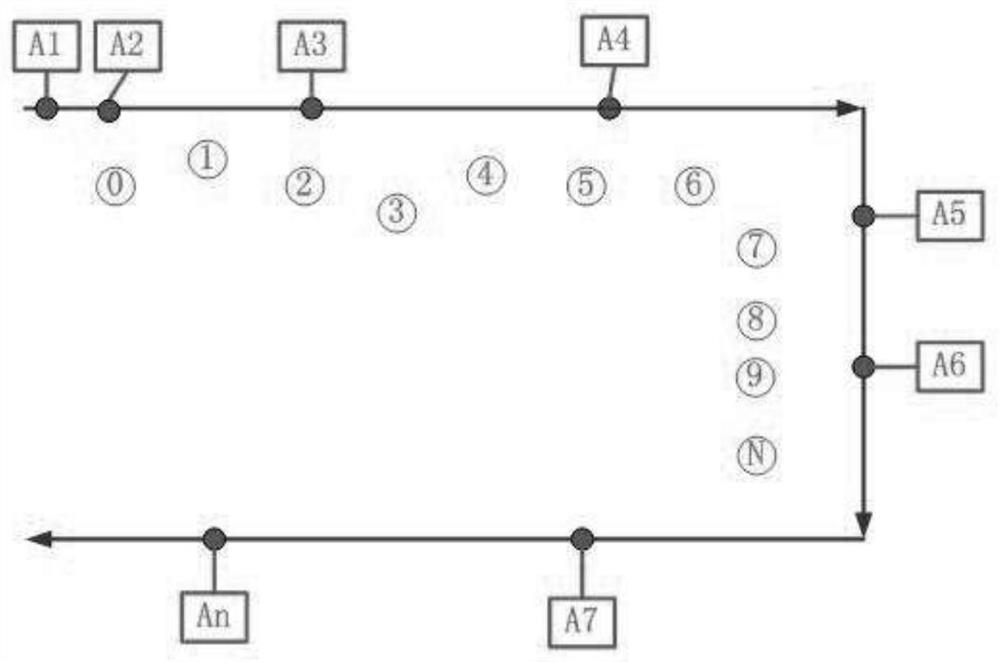
[0021] Such as figure 1 As shown, a UAV automatic inspection method based on a line coordinate sequence, the method steps are as follows: the ground station reads t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More