3D laser radar and foot type robot
A laser radar and 3D technology, applied in the direction of instruments, manipulators, radio wave measurement systems, etc., can solve the problems of inability to realize high-frequency scanning, high sensor requirements, and unfavorable promotion and use, so as to facilitate the promotion and use, wide application range, The practical effect of the plan
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment
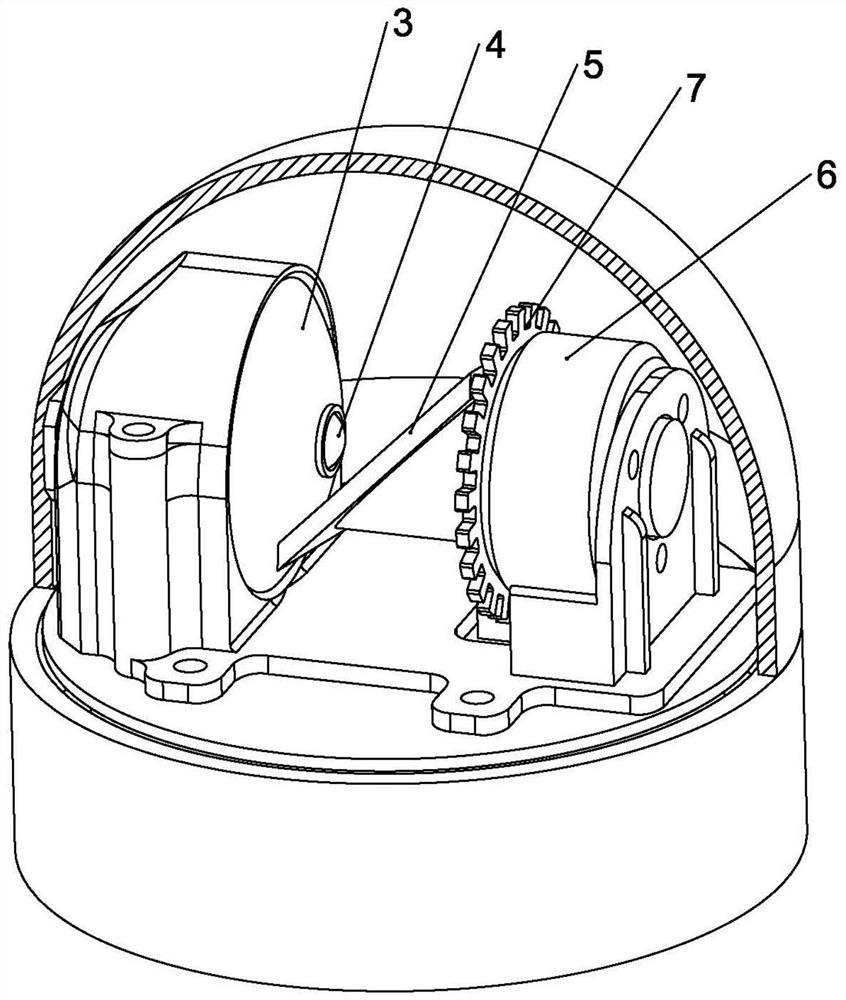
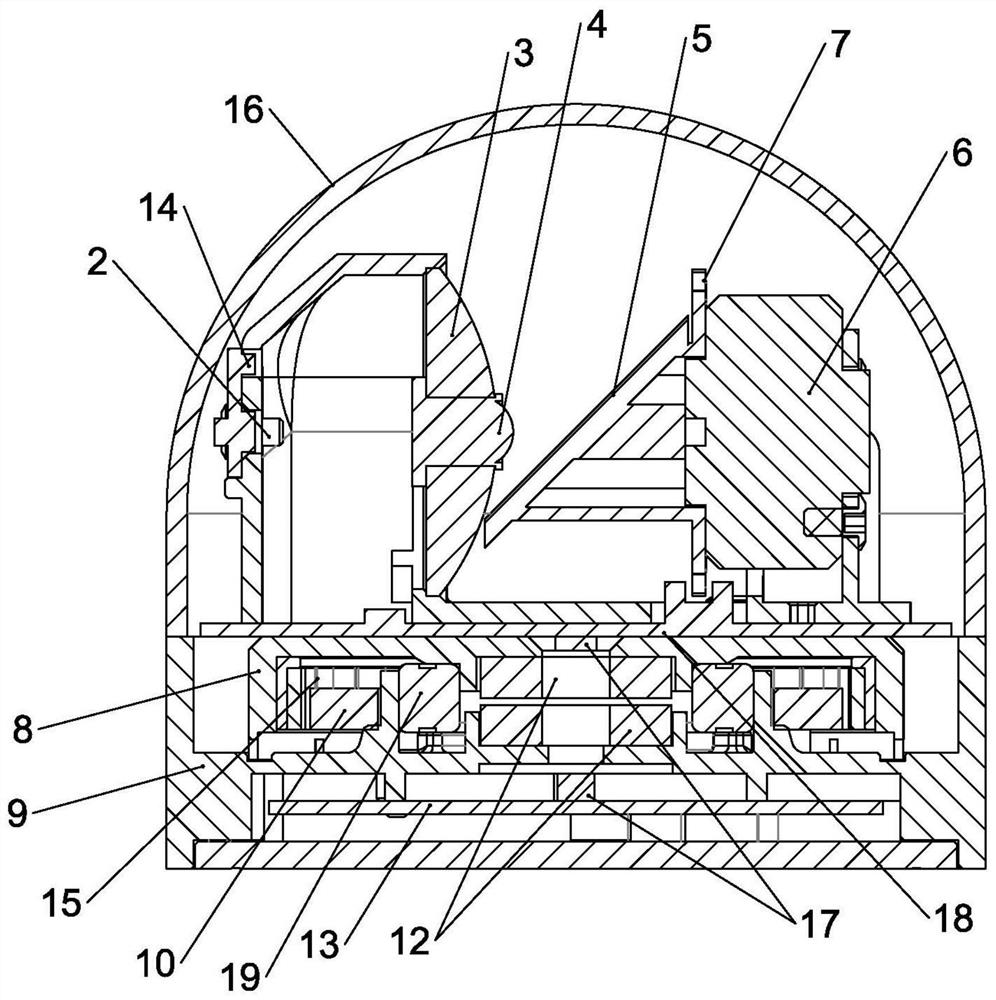
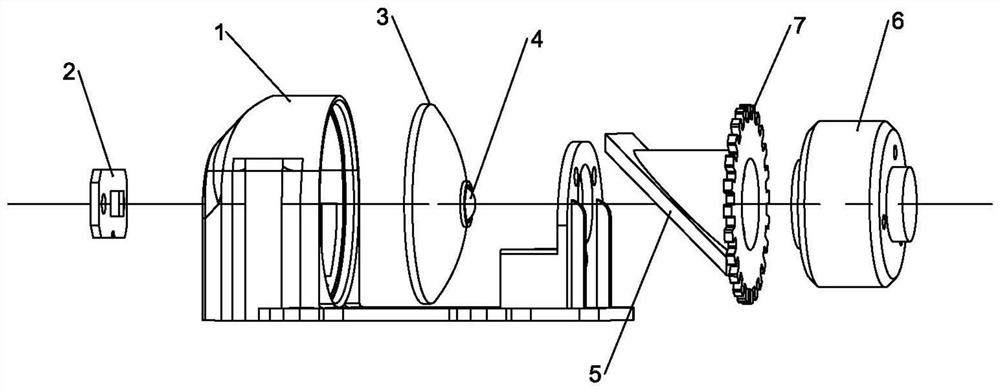
[0043] The vertical scanning unit also includes a first motor 6 and a first code wheel 7, the first motor 6 drives the reflector 5 to rotate, the first code wheel 7 is fixedly connected concentrically with the reflector 5, The rotation information of the reflector 5 is obtained through the first code wheel 7 .
[0044] A cooling fan is fixed coaxially with the first code wheel 7 on the output shaft of the first motor 6 . This structure is used for the airflow circulation inside the lidar, which is beneficial to the heat dissipation of heat-generating components such as motors. The structure is simple and the cost is low.
[0045] The present invention directly drives the reflector 5 to rotate at high speed through the first motor 6, so that the present invention can realize high-frequency scanning without affecting high-precision components such as the laser emitter 4. The scheme is simple and feasible.
[0046] A specific embodiment in which the visible light emitter 14 is ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More