

Orthopedic surgical robot with positioning function
A surgical robot and functional technology, applied in the field of surgical robots, can solve the problems of inconvenience, trouble, and easy displacement of the patient's limb position, and achieve the effect of convenient positioning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
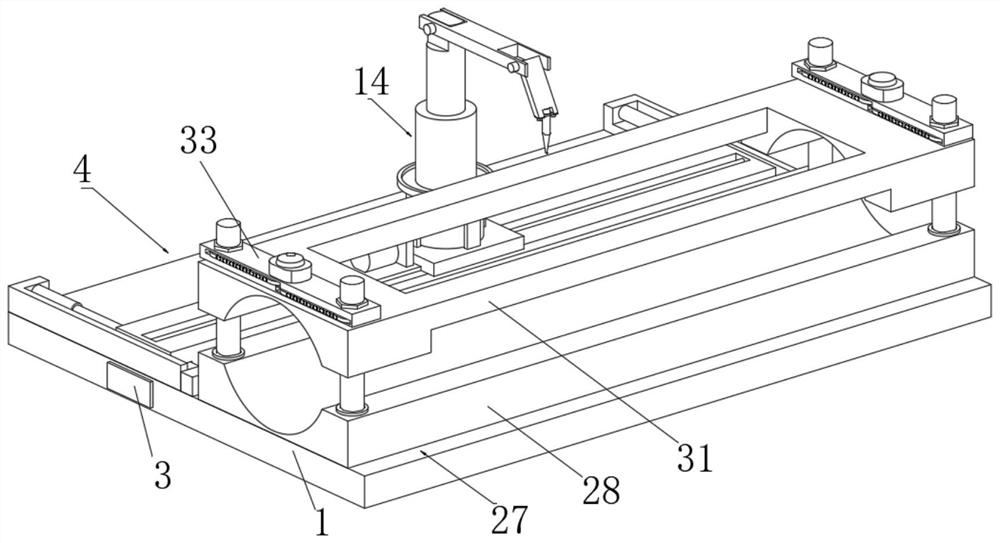
[0027] see figure 1 , 3 And 4, the present invention provides a technical solution: a surgical robot with positioning function based on orthopedics, including a workbench 1, the upper end of the workbench 1 is close to the partition plate 2 in the middle position, and the upper end of the workbench 1 is set close to the front position of the partition plate 2 There is a control module 3, a transmission mechanism 4 is arranged on the upper end of the workbench 1 near the left side of the partition plate 2, a drilling mechanism 14 is arranged on the transmission mechanism 4, and a limit mechanism 27 is arranged on the upper end of the workbench 1 near the right side.
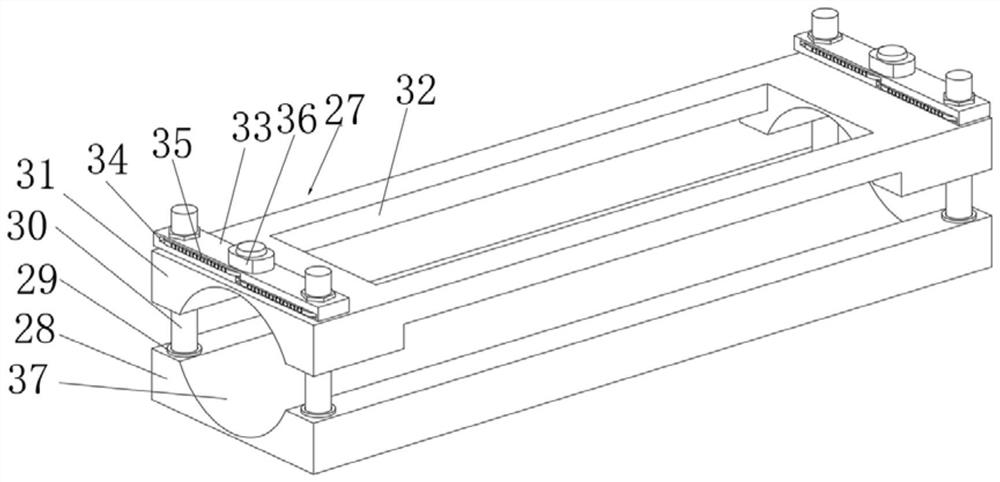
[0028] see image 3 , the limit mechanism 27 includes a placement plate 28 and a pressure plate 31, the upper end of the placement plate 28 is provided with a bearing 29 near the corner position, the upper end of the bearing 29 is provided with a screw 30, and the upper end of the pressure plate 31 is provided wi...
Embodiment 2
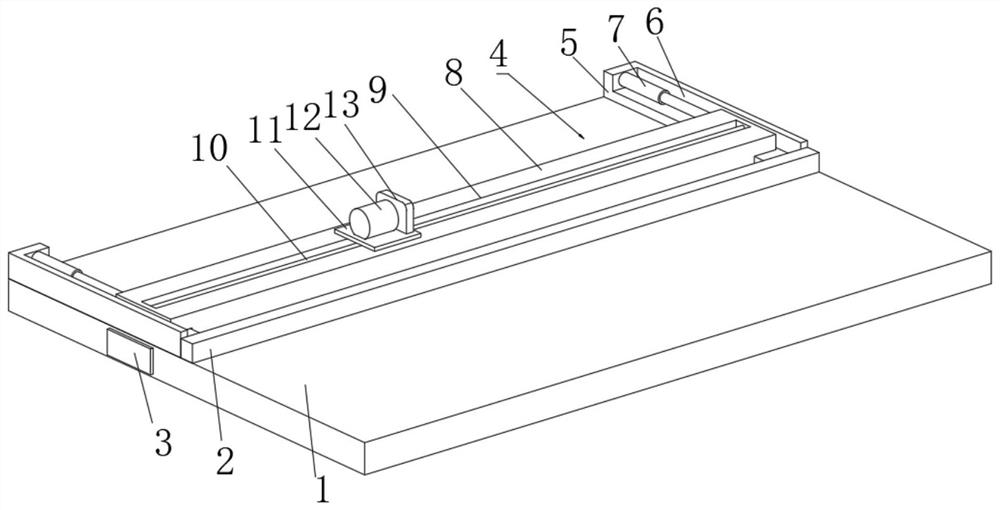
[0032] see figure 2 , 5And 6, the present invention provides a technical solution: a surgical robot with positioning function based on orthopedics, which also includes a transmission mechanism 4, the transmission mechanism 4 includes a baffle 5, and a chute 6 is opened on one side of the baffle 5 close to the top position , the inner wall of the chute 6 is provided with an electric telescopic rod 7, one side of the electric telescopic rod 7 is provided with a bearing plate 8, the upper end of the bearing plate 8 is provided with a transverse groove 9 near the middle position, and a slide bar 10 is arranged between the inner walls of the transverse groove 9 A horizontal plate 11 is movably arranged on the slide bar 10 , a transmission motor 12 is arranged on the upper end of the horizontal plate 11 , and a transmission plate 13 is arranged on the upper end of the horizontal plate 11 and on one side of the transmission motor 12 .
[0033] The output end of the transmission mot...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More