

A power fast loading device, a power device and a surgical robot
A power and containment technology, applied in the medical field, can solve problems such as difficult to meet the requirements of fast assembly, difficult to meet the requirements of fast assembly, and long disassembly and assembly time, so as to improve efficiency, ensure assembly stability, and facilitate disinfection and cleaning Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
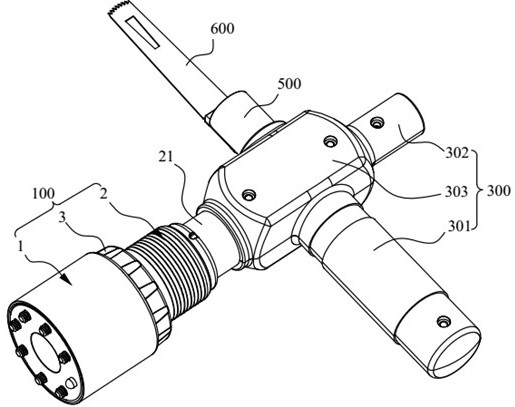
[0070] like figure 1 As shown, this embodiment provides a power device, which can be applied to a surgical robot, and is used to install the surgical instrument 600 on the robotic arm of the surgical robot, and drive the surgical instrument 600 to move, so as to realize the operation controlled by the surgical robot. The movement of the instrument 600 assists the doctor in performing the operation.
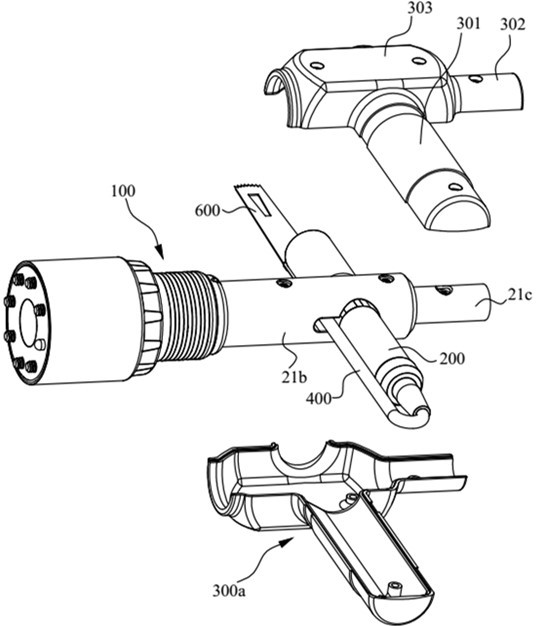
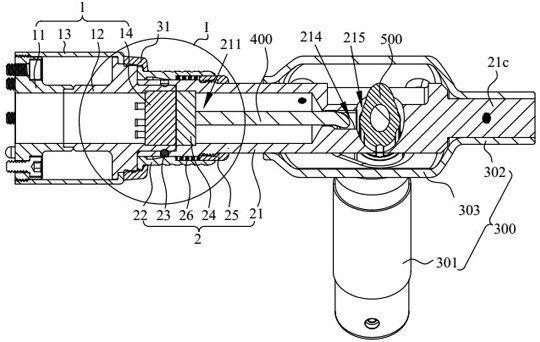
[0071] like Figure 1-3 As shown, specifically, the power device includes a power quick-installation device 100 and a power unit 200. One end of the power quick-installation device 100 is detachably connected to the mechanical arm. The power quick-installation device 100 includes a mounting spindle 21 on which a main The installation hole 215 , the driving end of the power unit 200 is inserted into the main installation hole 215 , and the extension direction of the power unit 200 is perpendicular to the extension direction of the installation spindle 21 . The power device also i...
Embodiment 2
[0127] like Figure 13-Figure 15 As shown, this embodiment provides a power quick-installation device, and the basic structure of the power quick-installation device provided by this embodiment is the same as that of Embodiment 1, only the partial structures of the base unit 1 and the locking unit 3 are different. In this embodiment, the same structure as that in Embodiment 1 will not be repeated.
[0128] In this embodiment, the base unit 1 also includes a fixing sleeve 13 and a mounting seat. The structure of the fixing sleeve 13 is the same as that of Embodiment 1, and the mounting seat is integrally formed. That is, compared with Embodiment 1, in this embodiment The flange portion 112 , the flange portion 122 and the boss portion 123 are all radially projected on the insertion cylinder portion 121 , and one end surface of the insertion cylinder portion 121 is flush with the flange portion 112 . The structural setting of this kind of mounting seat can ensure the coaxiality...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More