Unmanned intelligent cluster joint trajectory design method
A trajectory design and cluster technology, applied in the direction of instruments, three-dimensional position/channel control, control/regulation system, etc., to achieve high economic benefits, reduce calculation pressure and control difficulty, and low complexity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0103] specific implementation plan
[0104] The present invention provides a big data collection system based on a joint unmanned aerial vehicle cluster and a mobile platform, aiming at improving the safety, applicability and intelligence of big data collection. And in order to improve the performance of the system, the present invention proposes an efficient and low-complexity unmanned swarm joint trajectory design method.
[0105] Below in conjunction with accompanying drawing, the present invention will be further described:
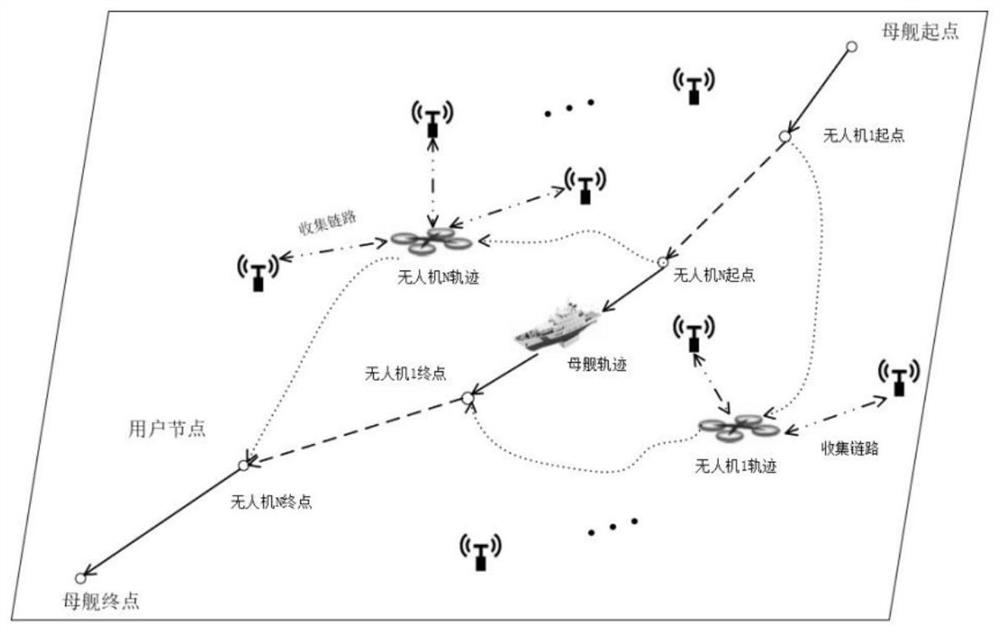
[0106] figure 1 A marine UAV cluster data collection system proposed by the present invention includes N=3 UAVs, K=1 user and a platform. The platform is at the starting point (x α ,y α )=(0,0) to the target point (x β ,y β )=(3000, 3000) Fly the drone to collect sensor data during the flight, and recover the drone at the end of the flight of each drone. The flight height of the UAV is fixed at H=30m, the maximum flight speed is V=10 m / s, and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com