

Enveloping-shaped deep-sea soft fingers and deep-sea soft gripper
A finger and software technology, applied in the direction of manipulators, chucks, manufacturing tools, etc., can solve the problems of no envelope structure, low grasping success rate, low fishing efficiency, etc., to improve the grasping success rate, high response speed, The effect of good practicality and safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The present invention will be described in further detail below in conjunction with the accompanying drawings.
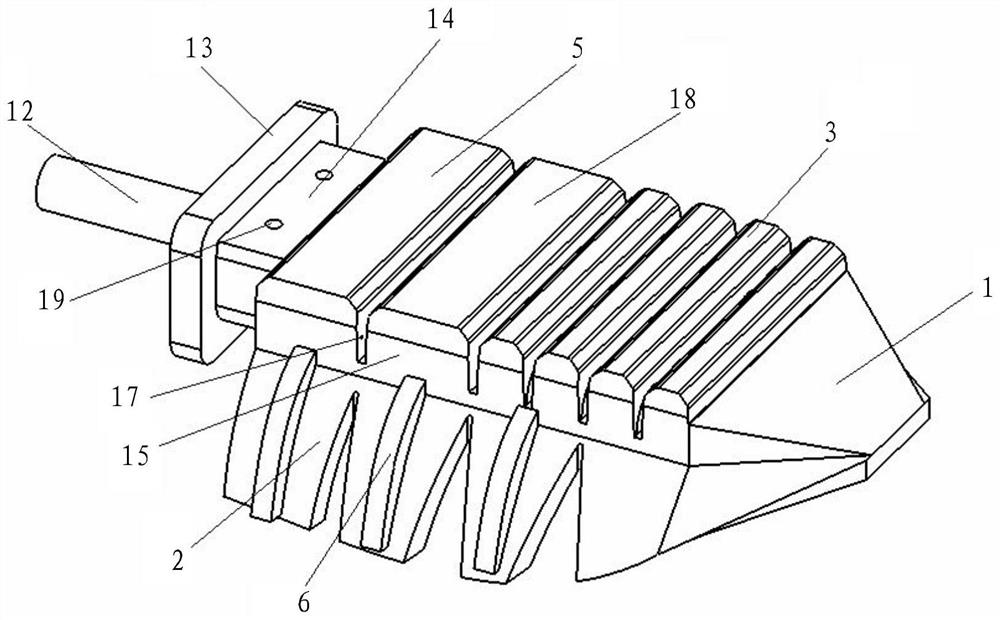
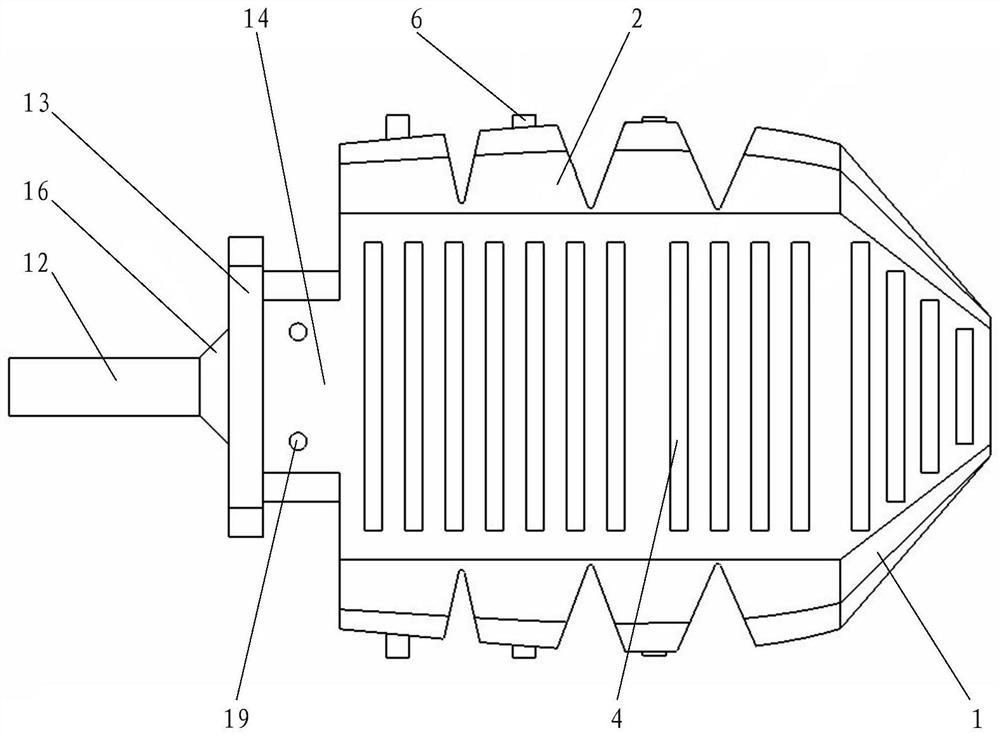
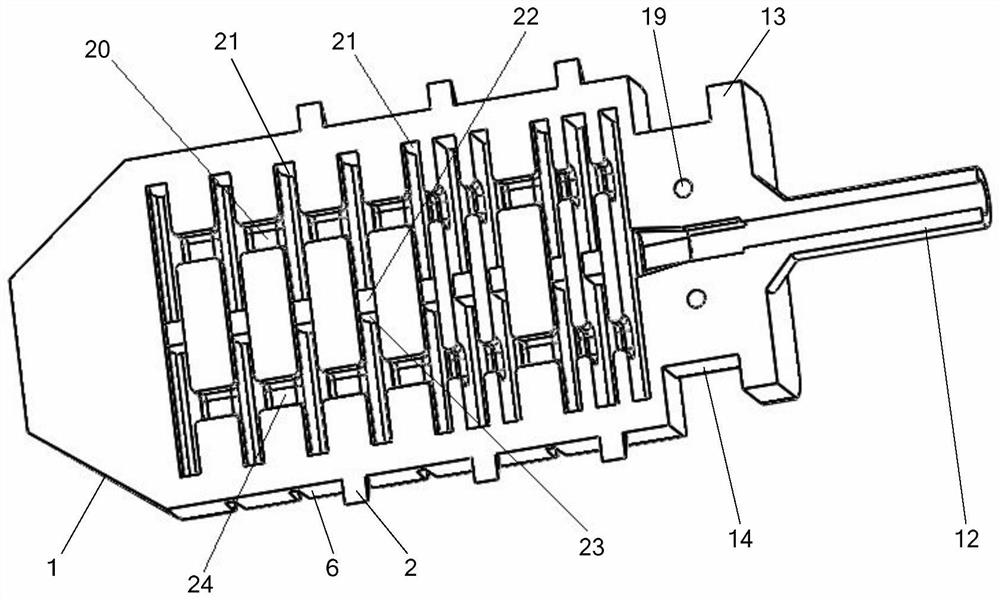
[0038] Such as Figure 1~5As shown, the soft finger of the present invention is divided into fingertip 1, deformation section, finger fixing section 14, sealing clamping piece 13 and pressure pipe 12 successively from front to back. Network structure plate 2, a tapered reinforcement table 16 is provided between the pressure pipe 12 and the sealing clamping piece 13, and a finger fixing hole 19 is provided on the finger fixing section 14; the deformation section includes a small pressure bag 3 and a large pressure bag 5, and the small The internal chamber 21 in the pressure capsule 3 and the internal chamber 21 in the large pressure capsule 5 are both connected to the pressure pipe 12 through the pressure channel, the pressure pipe 12 passes through the sealing clamping piece 13 and the finger fixing section 14, and the liquid passes through The pressure pipe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More