

Bionic fish hydrodynamic prediction method based on CFD and MLP
A prediction method, bionic fish technology, applied in the field of marine engineering and bionic robots, can solve the problems of not fully reflecting the swimming posture of fish, affecting the hydrodynamic performance and efficiency of bionic fish, and not showing, so as to improve operational efficiency and convenience, avoid grid negative volume, enhance the effect of confidence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0058] In order to understand the above-mentioned purpose, features and advantages of the present invention more clearly, the present invention will be further described below in conjunction with the accompanying drawings and embodiments. In the following description, numerous specific details are set forth in order to provide a thorough understanding of the invention, but the invention may also be practiced otherwise than as described herein. Accordingly, the present invention is not limited to the specific examples disclosed below.
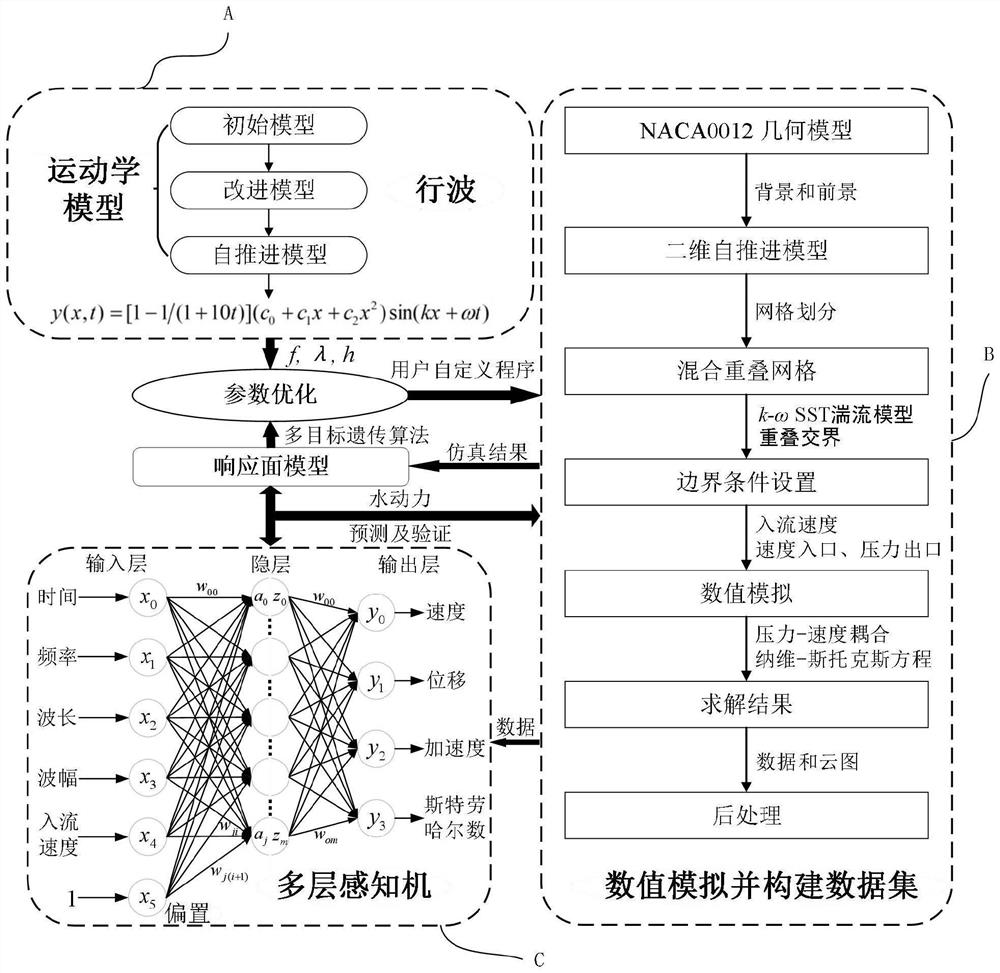
[0059] The present invention is realized by adopting the following technical solutions: a bionic fish hydrodynamic prediction method based on computational fluid dynamics (Computational Fluid Dynamics, CFD) and multilayer perceptron (Multilayer Perceptron, MLP), comprising the following steps:
[0060] Step A. Establish an improved self-propelled motion model: Based on Matlab, conduct research on the classic traveling wave model, compare the dif...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More