Robot task allocation method and device, electronic equipment and storage medium
A task allocation and robot technology, applied in the field of intelligent warehouse management, can solve the problems of increasing robot walking distance, increasing robot energy consumption, reducing task processing efficiency, etc., to reduce walking distance, avoid movement path crossing, and improve task processing efficiency Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
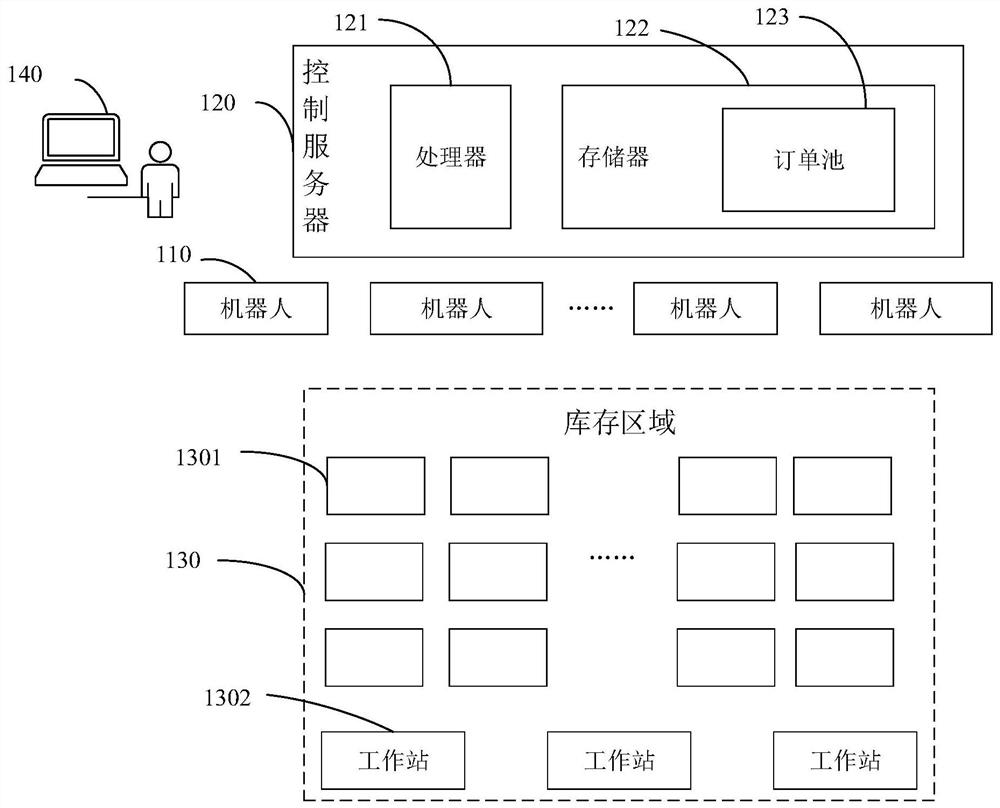
[0077] based on Figure 1a The provided system, in the embodiment of the present disclosure, in order to reduce the congestion caused by the intersection of robot paths caused by the dynamic scheduling of robots among different workstations, provides a robot task assignment method, which divides inventory containers into Several inventory partitions, and respectively establish the binding relationship between the workstation and the target inventory partition and the binding relationship between the robot and the target inventory partition, thus, establish the binding relationship between the workstation and the robot through the target inventory partition, The robot only needs to move in a fixed area, avoiding the congestion caused by the crossing of the robot's movement path, and at the same time reducing the walking distance of the robot and reducing its energy consumption.
[0078] Such as Figure 1b As shown, it is a flowchart of a robot task assignment method provided by...
Embodiment 2
[0120] After binding workstations, robots, and corresponding inventory partitions according to the divided inventory partitions, during the process of corresponding order tasks, there may be unbalanced task loads among workstations, that is, some workstations have a large amount of tasks, and robots Overloaded operation, and some workstations have a small amount of tasks, some robots bound to the workstations are in an idle state or the task load is not saturated, resulting in a waste of robot resources. In this case, in order to improve the task processing efficiency and the utilization rate of the robot resources, the embodiment of the present disclosure adds dynamic scheduling of the robot on the basis of binding the robot to the workstation as described above.
[0121] Such as Figure 5 As shown in , it is a schematic flow diagram of scheduling robots for workstations with overloaded tasks, which may include the following steps:
[0122] S501: For target workstations whos...
Embodiment 3
[0129] refer to Figure 6 As shown, it is a schematic structural diagram of a robot task distribution device, including:
[0130] A division unit 601, configured to divide the inventory container into a plurality of inventory partitions according to preset logic;
[0131] The first determining unit 602 is configured to determine the first time elapsed for the robot to reach each workstation from each inventory partition, and bind the target inventory partition for each workstation according to the first time elapsed;
[0132] The second determining unit 603 is configured to determine a second elapsed time for the robot to reach each target inventory partition from the current location, and bind each robot to the target inventory partition according to the second elapsed time.
[0133] In an optional implementation manner, the division unit includes:
[0134]a first determining module for determining a third elapsed time for the robot to reach the workstation from each invent...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More