

Tool spacecraft system for on-orbit control
A spacecraft and tool technology, applied in tools, aerospace equipment, transportation and packaging, etc., can solve the problems of not being able to take care of multiple tasks, few, only one or two, single tasks, etc., to improve task adaptability , improve diversity, and increase reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
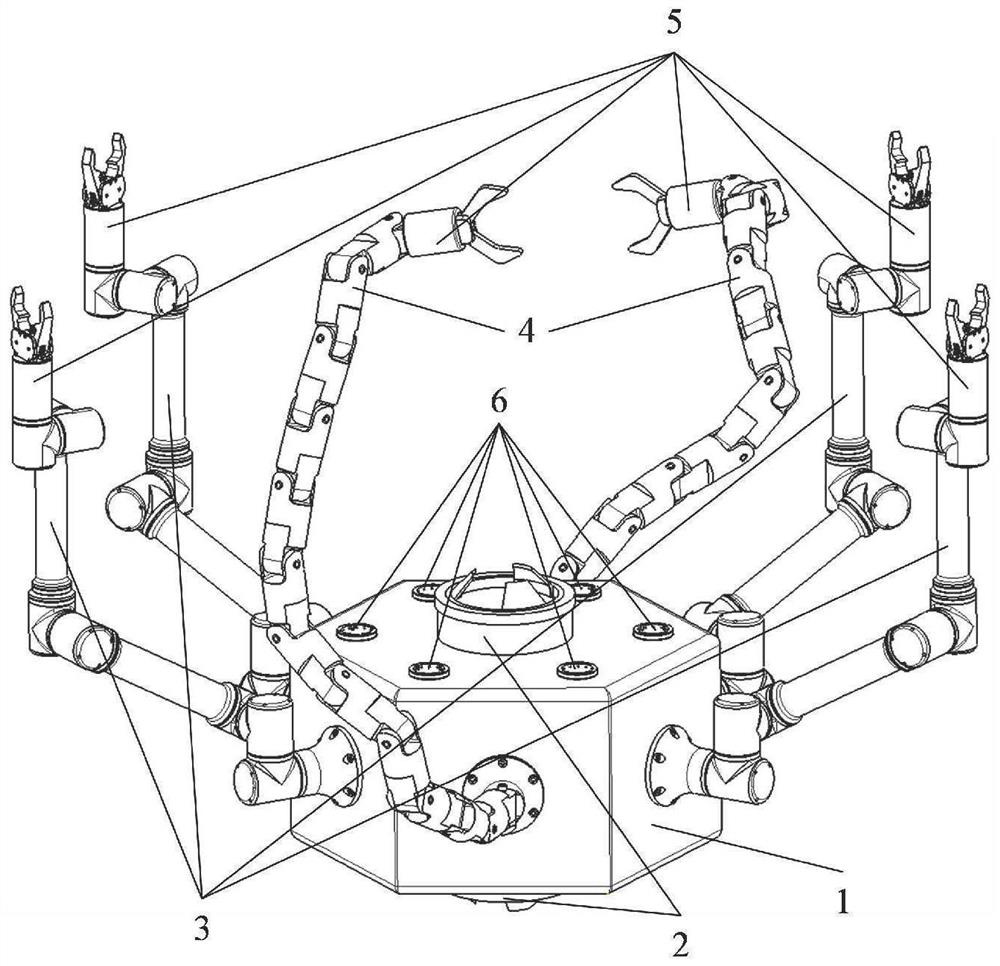
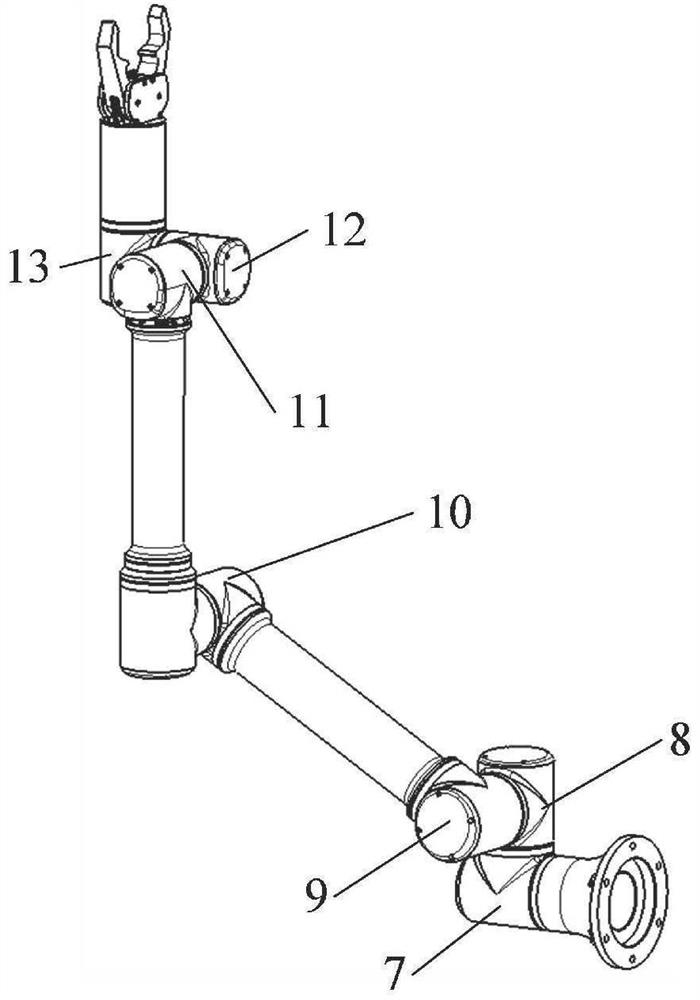
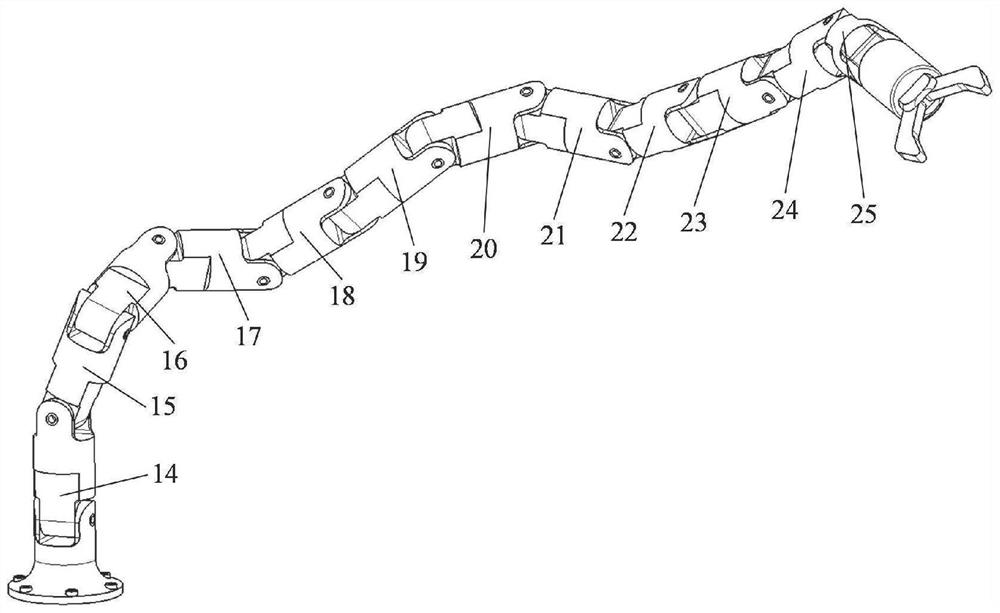
[0031] Specific implementation mode 1: see Figure 1-6 This embodiment will be described. The on-orbit manipulation-oriented tool spacecraft system described in this embodiment includes a spacecraft base 1, a docking mechanism 2, multiple rigid robotic arms 3, multiple flexible robotic arms 4, and an end effector 5. The spacecraft The docking mechanism 2 is installed up and down on the base 1, and a plurality of rigid robotic arms 3 and a plurality of flexible robotic arms 4 are mounted on the spacecraft base 1, and the ends of the multiple flexible robotic arms 4 and the multiple rigid robotic arms 3 are installed There are end effectors 5.
[0032] The tool spacecraft system includes multiple rigid robotic arms 3 and multiple flexible robotic arms 4. The combination of rigidity and flexibility can realize cooperative operations in narrow spaces and complex structures, and has incomparable advantages over traditional space robots. One of the inventions of the present invent...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More