

Self-adaptive forward output consistent safety controller for multi-single-arm manipulator
A manipulator, self-adaptive technology, applied in manipulators, manufacturing tools, etc., can solve problems such as precise control that cannot achieve output consistency, difficult control problems, low efficiency, etc., to reduce communication frequency, overcome negative effects, and avoid continuous monitoring. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0064] The specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings.
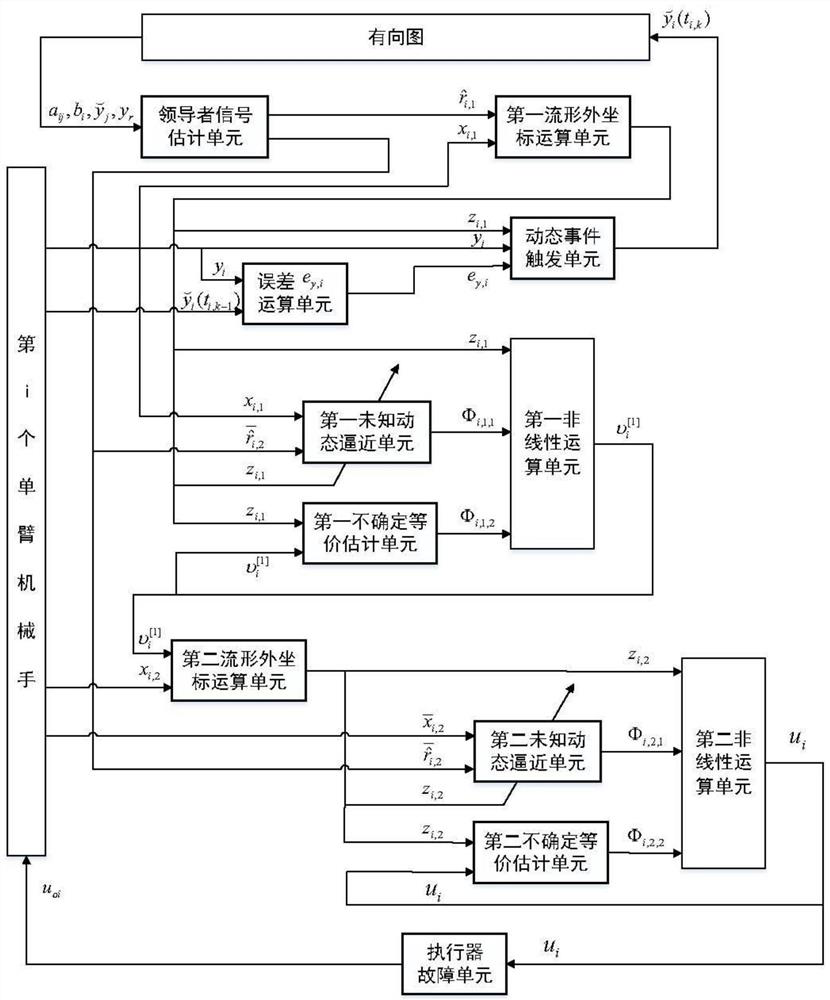
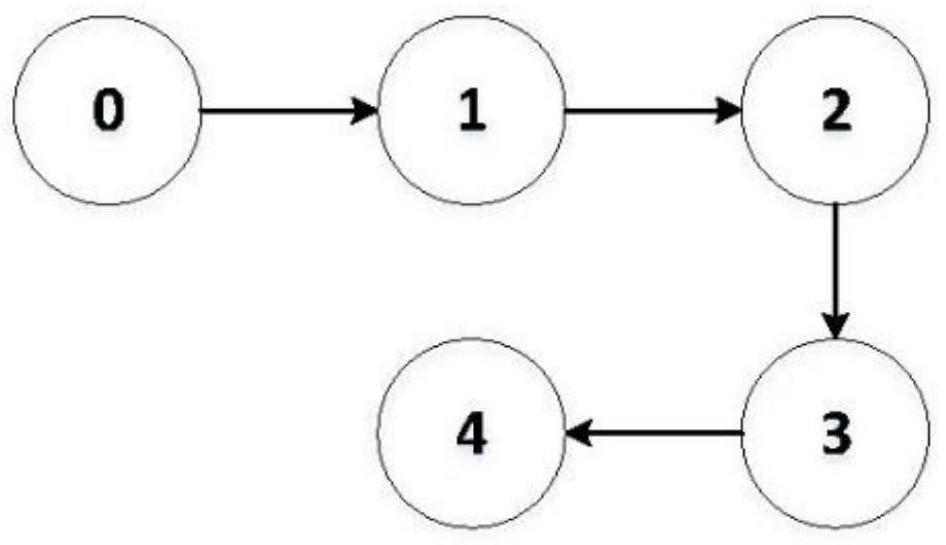
[0065] The present invention designs a multi-single-arm manipulator self-adaptive forward output consistent safety controller, aiming at N follower single-arm manipulators with communication links between each other and at least one follower single-arm manipulator with a communication link The leader of the road, the single-arm manipulator, combined with the directed graph constructed by using the single-arm manipulator as a node and having one-way communication between two pairs of single-arm manipulators. Combined with the actuator failure unit, the consistent control of the forward output of each follower single-arm manipulator and the forward output of the leader single-arm manipulator is realized.
[0066] In the application, the directed graph constructed above in, is a set of nodes in a directed graph, and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More