

Robot path planning method fusing bidirectional search mechanism and improved A* algorithm
A two-way search and path planning technology, applied to instruments, surveying and navigation, road network navigators, etc., can solve the problems of uneven overall path, long path planning time, and failure to consider the safe distance between robots and obstacles, etc., to achieve The effect of reducing planning time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
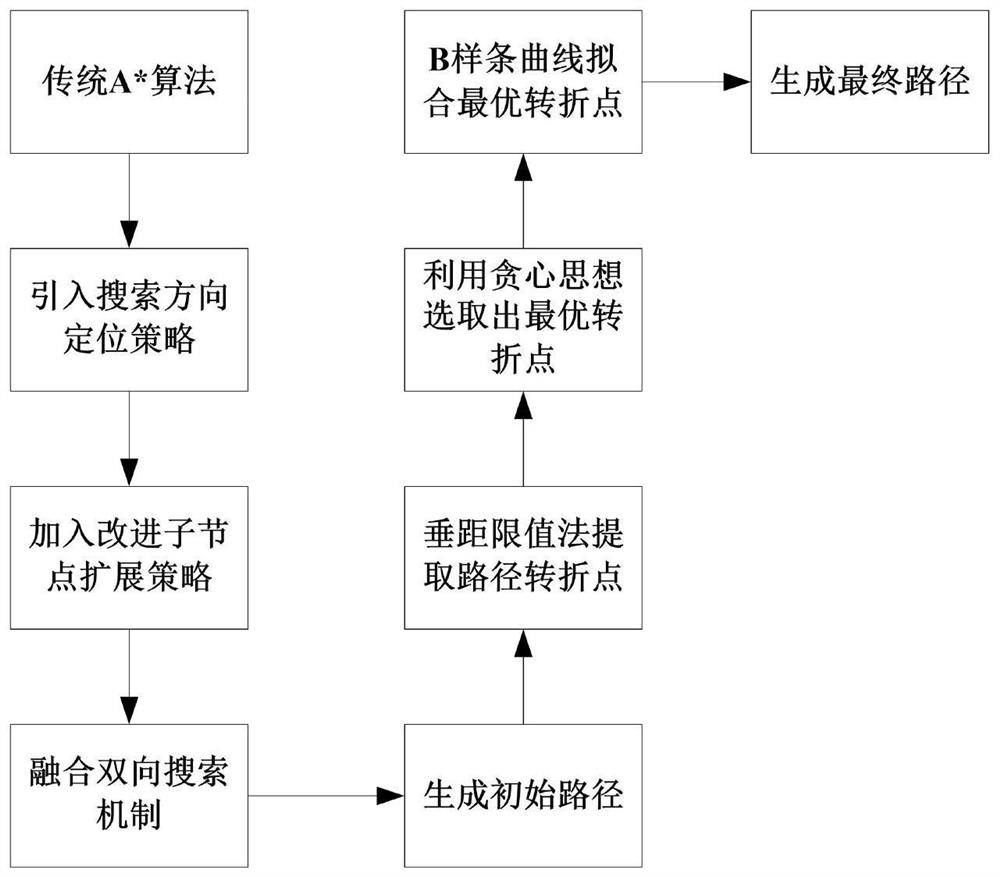
[0048] The purpose of the present invention is to provide a robot path planning method that combines a two-way search mechanism and an improved A* algorithm.
[0049] In order to achieve the above object, the solution of the present invention is:
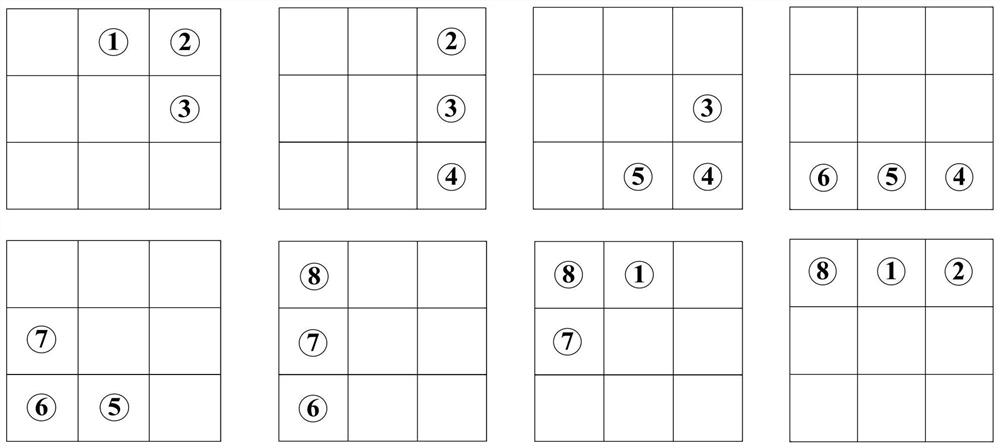
[0050] (1) The traditional A* algorithm compares the horizontal and vertical coordinates of the current node and the target node to determine the direction when searching for a path. Nodes in the same direction as the target are retained, and nodes opposite to the target direction are deleted;
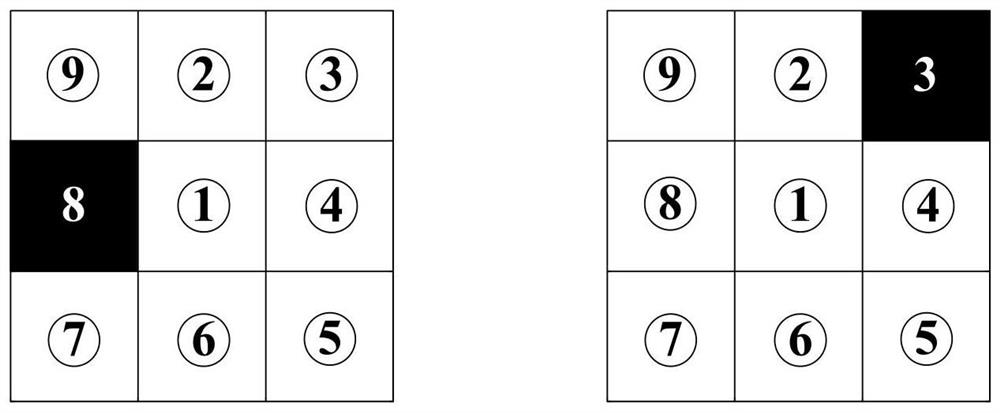
[0051] (2) When checking that there is an obstacle node in the adjacent grid of the searched node, this node will not be used as a node to be expanded, that is, the node will be deleted, so as to ensure that the expanded node maintains a safe distance from the obstacle;
[0052] (3) Use the improved A* algorithm to search from the starting point and the target point at the same time, and expand to the respective target points at the same tim...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More