Automobile hub deburring workstation robot calibration tool and calibration method thereof
A technology of automobile wheel hub and calibration method, which is applied in the direction of manufacturing tools, machine tools suitable for grinding workpiece edges, metal processing equipment, etc., which can solve the problem of inability to calibrate the tool coordinate system, the inability to verify the accuracy of the coordinate system, the accuracy of robot motion trajectory, and the inability to calibrate Problems such as workpiece coordinate system
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The specific implementation of the present invention will be described in further detail below by describing the embodiments with reference to the accompanying drawings, so as to help those skilled in the art have a more complete, accurate and in-depth understanding of the inventive concepts and technical solutions of the present invention.
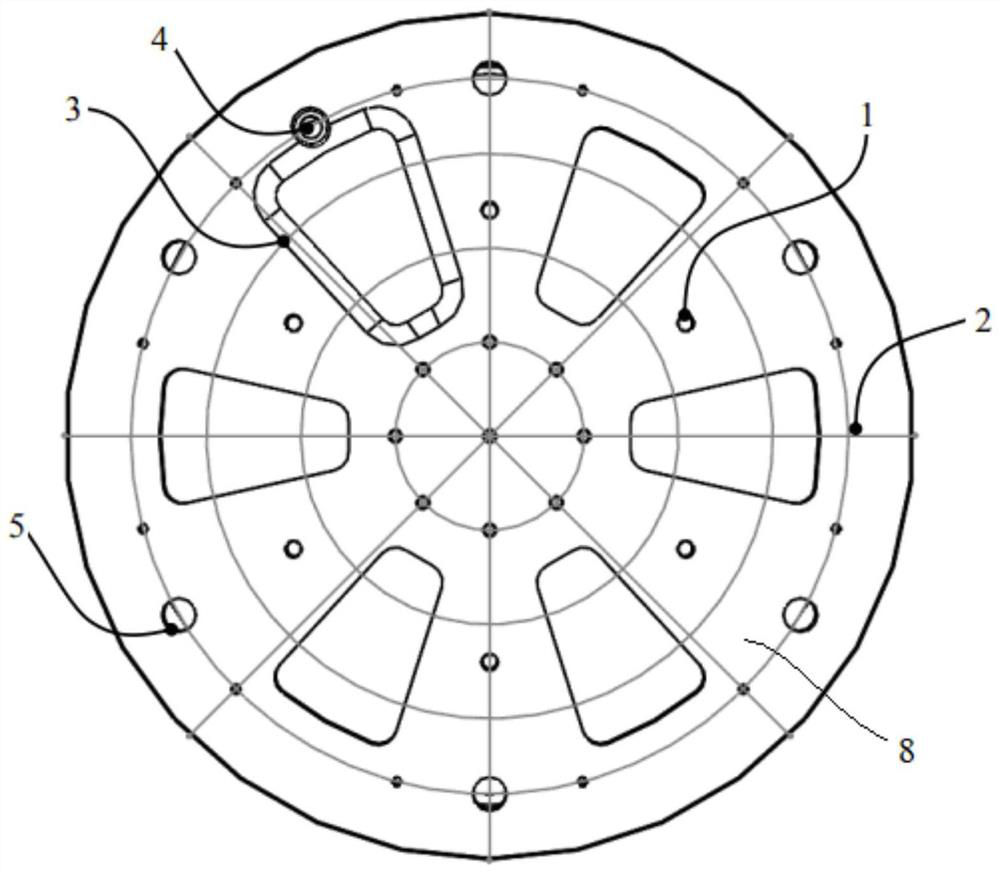
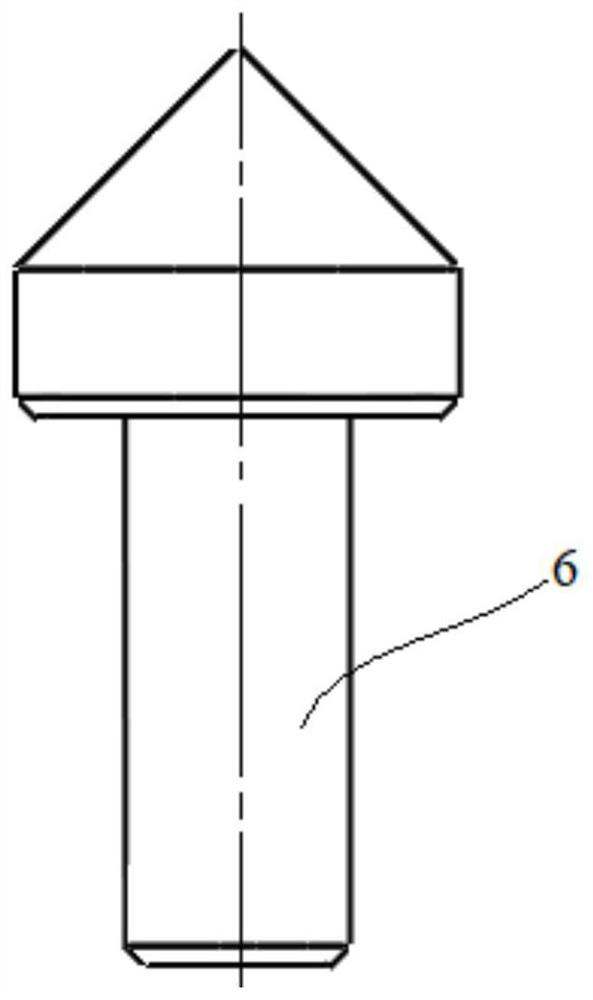
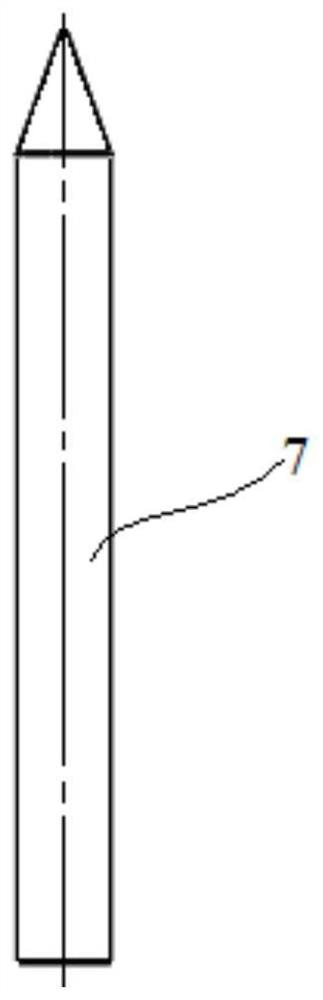
[0040] Such as figure 1 , figure 2 with image 3 The structure of the present invention shown is a robot calibration tool for a deburring workstation of an automobile hub. The calibration tool includes a hub calibration disc 8; the hub calibration disc 8 is a cylindrical structure, and the upper surface is the working surface of the calibration tool.
[0041] In order to solve the problems existing in the prior art and overcome its defects, to achieve the purpose of calibrating the relative position of the tool coordinate system and the wheel hub of the robot, and verifying the trajectory accuracy of the robot after calibration, ...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap