

A targetless spreader positioning method for automatic driving closed-loop control
A technology of closed-loop control and positioning method, which is applied in the direction of comprehensive factory control, load hanging components, transportation and packaging, etc., and can solve problems such as the lack of installation conditions, the inability to automatically resume operations, and the high cost of enterprise research.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] In order to make the objectives, technical solutions and beneficial technical effects of the present invention clearer, the present invention will be further described in detail below with reference to the accompanying drawings and specific embodiments. It should be understood that the specific embodiments described in this specification are only for explaining the present invention, and not for limiting the present invention.
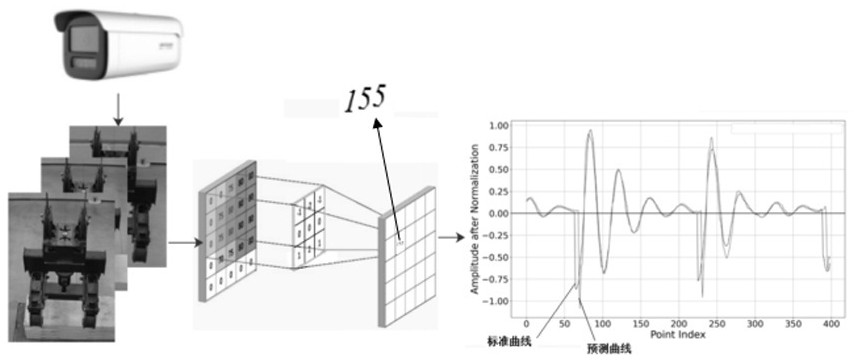
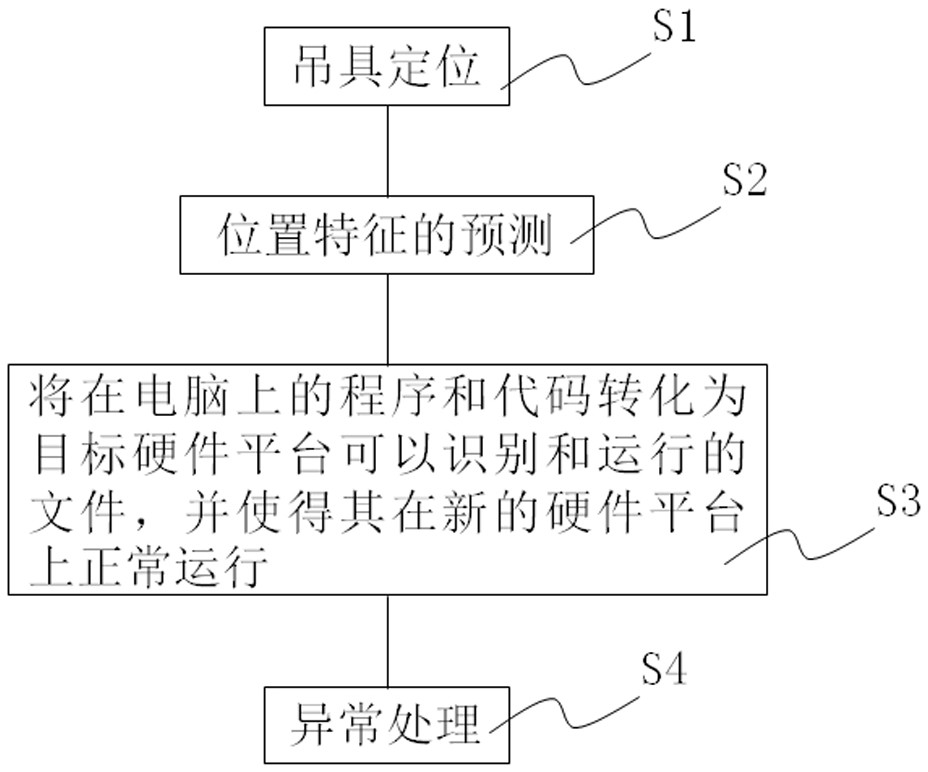
[0021] see Figure 1 to Figure 2 , the present invention provides a target-free spreader positioning method for closed-loop control of automatic driving, comprising the following steps:
[0022] S1: Spreader positioning.
[0023] Since the spreader is diverse and the working conditions are also diverse, it is necessary to obtain the position characteristics of the spreader stably and reliably.
[0024] Specifically, the following steps are used to obtain the position feature of the spreader, and step S1 further includes step S11 : the feature ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More