

Dielectric elastomer driver, flexible foot and starfish-imitating soft robot
A technology of dielectric elastomer and dielectric elasticity, which is applied in the direction of manipulators, manufacturing tools, claw arms, etc., can solve the problems of difficult temperature control and low energy utilization rate, and achieve the effect of high energy efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0035] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention. In addition, the technical features involved in the various embodiments of the present invention described below can be combined with each other as long as they do not constitute a conflict with each other.
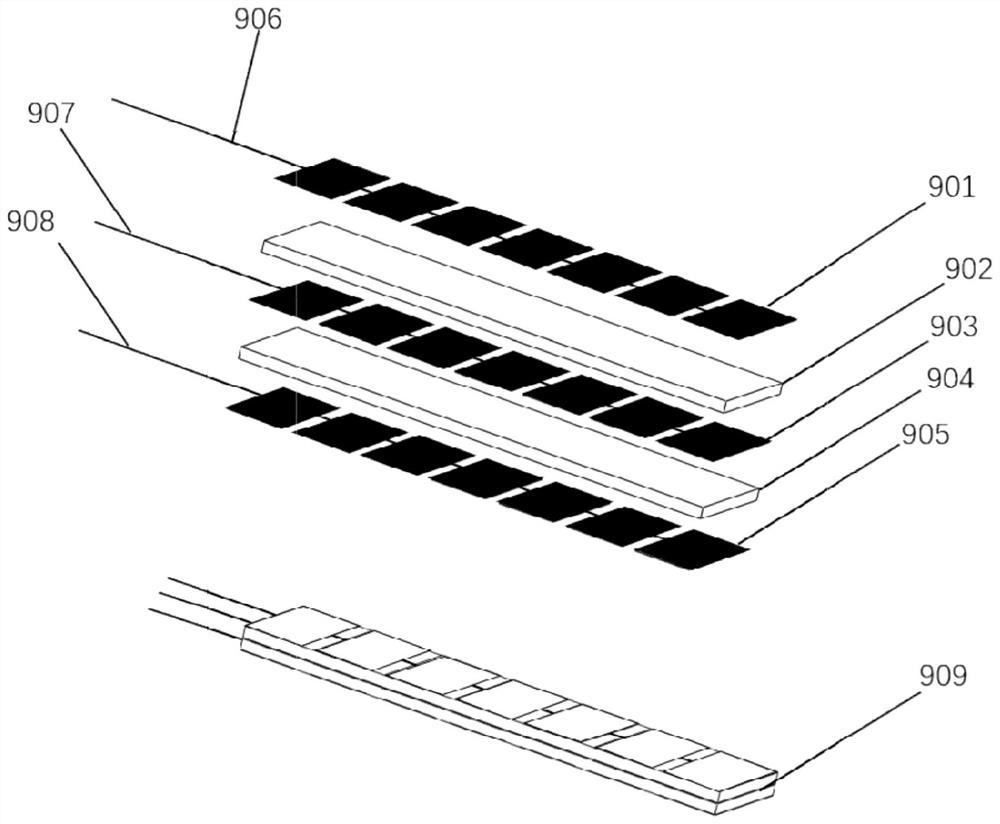
[0036] like figure 1 As shown, the present invention provides a dielectric elastomer driver, comprising: two dielectric elastomer films (902, 904, identical in shape and size), three groups of carbon paste flexible electrodes (901, 903, 905) and three Copper conductors (906, 907, 908).
[0037] The dielectric elastomer film is rectangular, with a length of 51 mm, a width of 12 mm, and a height...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More