

Unmanned driving emergency obstacle avoidance path tracking method
A path tracking and obstacle avoidance technology, applied in the direction of external condition input parameters, control devices, vehicle components, etc., can solve the problems of large vehicle lateral acceleration, vehicle rollover accidents, etc., to reduce the steering wheel angle, easy rollover, lift The effect of mobility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
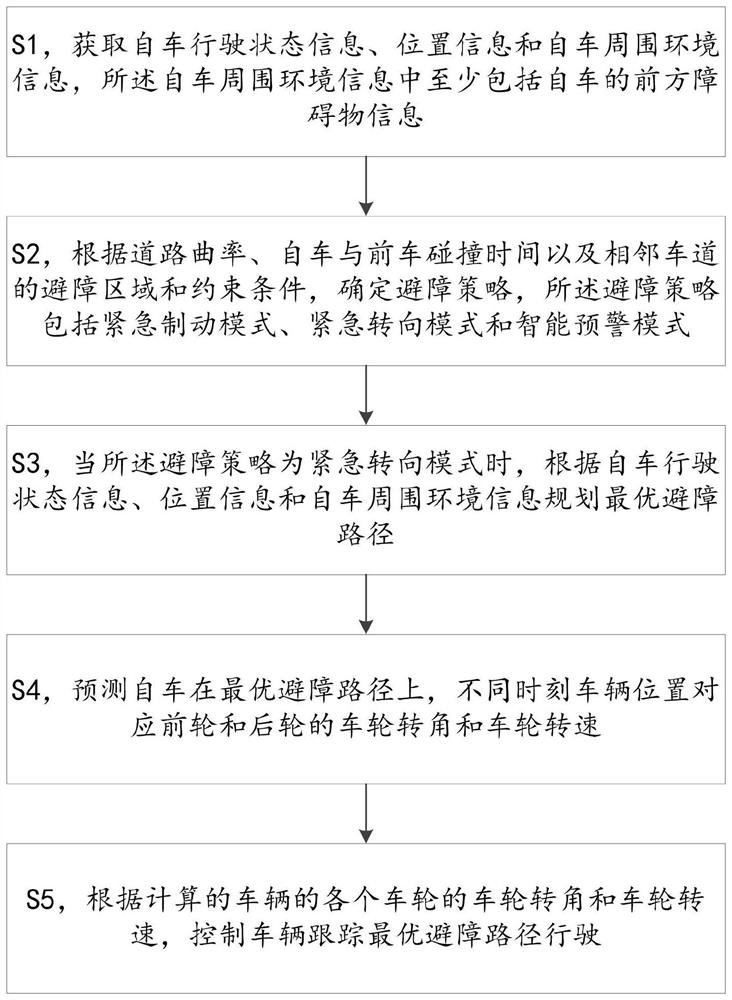
[0019] A kind of path tracking method for unmanned emergency obstacle avoidance, see figure 1 , the emergency obstacle avoidance path tracking method mainly includes the following steps:
[0020] S1. Acquiring driving state information, location information, and surrounding environment information of the own vehicle, where the surrounding environment information of the own vehicle includes at least information on obstacles ahead of the own vehicle.
[0021] It can be understood that during the driving process, the vehicle can use the on-board sensors to perceive the driving state information, location information and surrounding environment information of the vehicle, wherein the surrounding environment information of the vehicle mainly includes the obstacle information in front of the vehicle, including the obstacle in front of the vehicle. Object coordinates, size, and distance information, and screen the perceived obstacles to ensure that they are indeed obstacles. Subseque...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More