

Monocular vision-based six-finger manipulator capable of changing grabbing modes
A technology of monocular vision and manipulator, which is applied in the direction of manipulators, manufacturing tools, chucks, etc., can solve the problems of decreased work efficiency, placement work without precision requirements, and complicated switching, so as to save time, improve the level of intelligence, and rotate flexibly. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Example Embodiment
[0030] Example
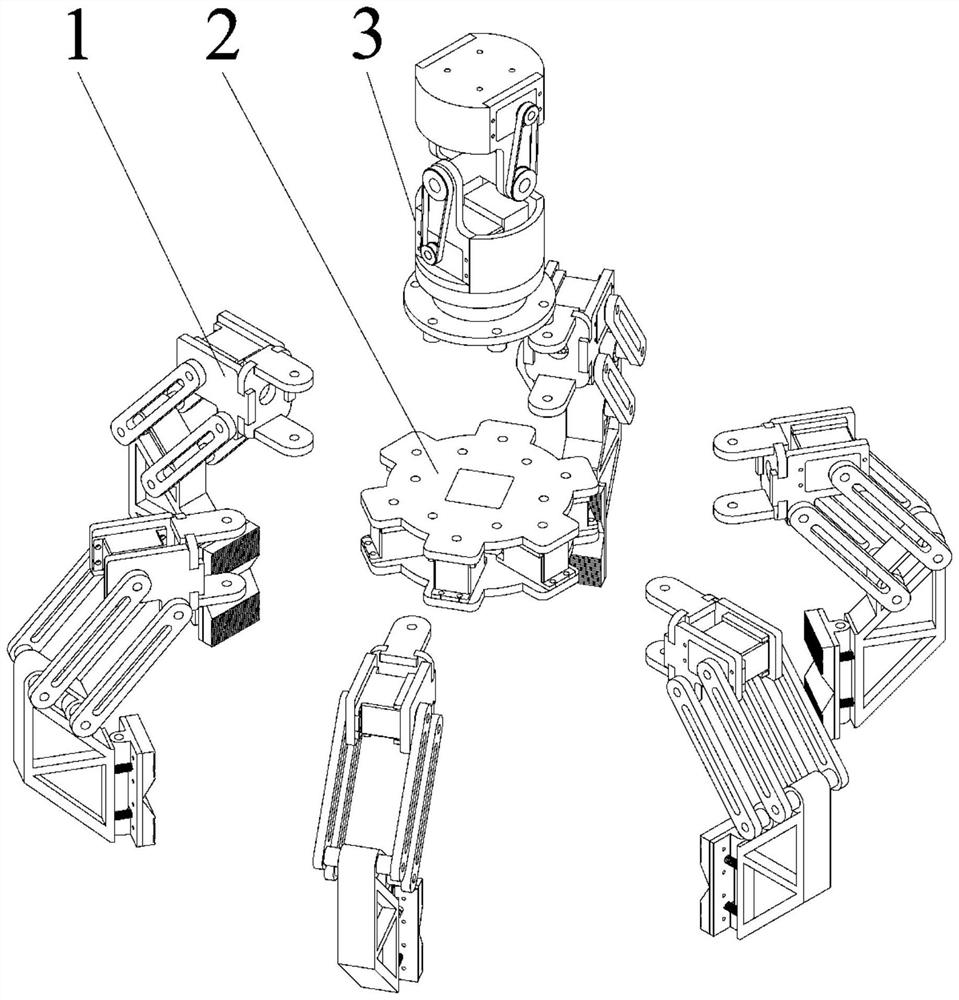
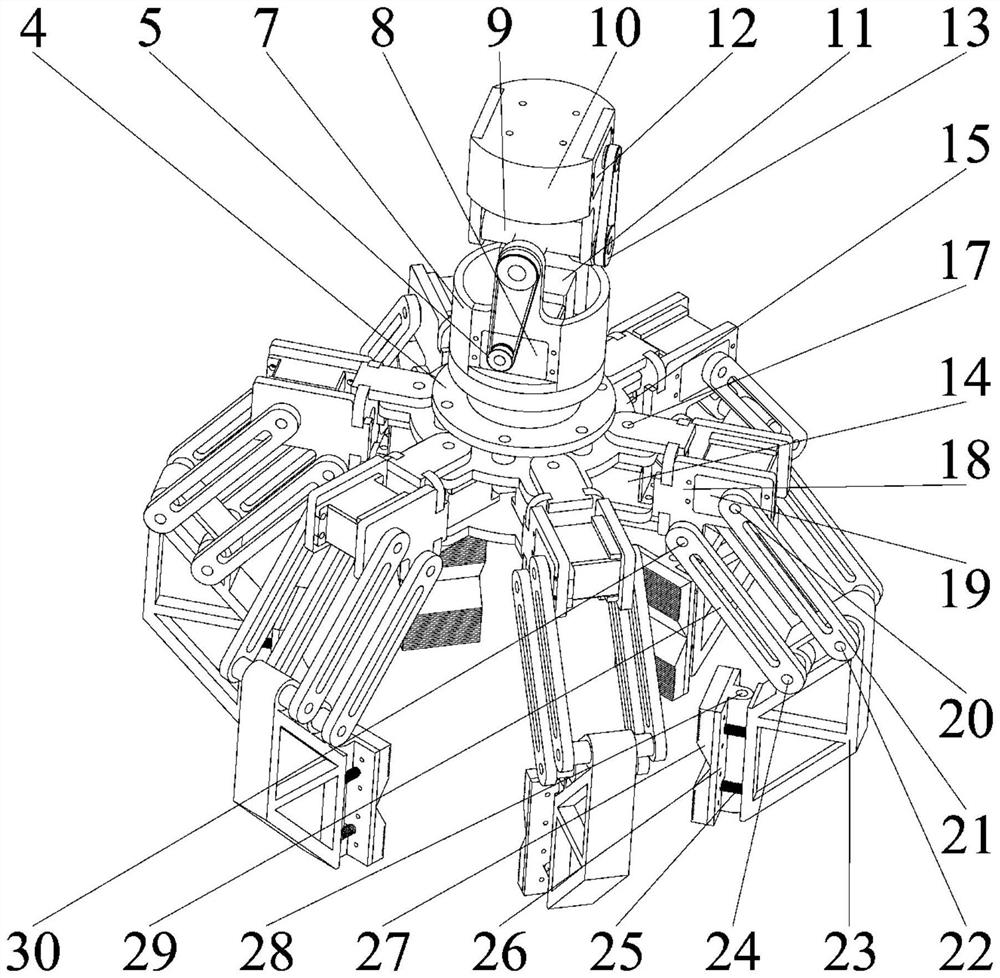
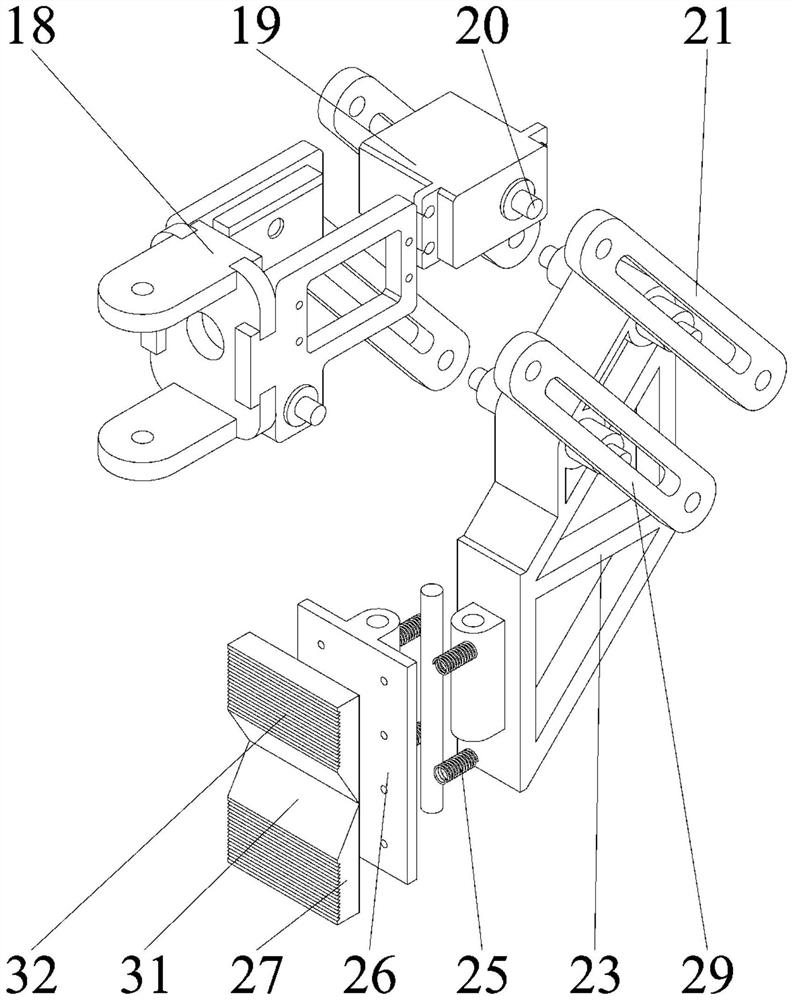
[0031] see also Figure 1 and Figure 2 , in which Figure 1 It is an exploded schematic diagram of a six-finger manipulator with changeable grasping mode based on monocular vision. Figure 2 It is a structural schematic diagram of a six-fingered manipulator with changeable grasping mode based on monocular vision.
[0032] such as Figure 1 and Figure 2 As shown, a six-finger manipulator with changeable grasping mode based on monocular vision is characterized by comprising six mechanical fingers 1, a mechanical palm 2 and a mechanical wrist 3; The mechanical finger 1 is provided with six finger steering engines 19 for driving the mechanical finger 1 to grab; The mechanical palm 2 is provided with six palm steering engines 14, which can control the six mechanical fingers 1 to quickly switch the appropriate grasping mode according to the target shape acquired by the monocular camera 16. The mechanical wrist 3 has three degrees of freedom, which can realize the rotation o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More