

Anthropomorphic automatic driving strategy based on model predictive control
A model predictive control and automatic driving technology, applied in the direction of constraint-based CAD, prediction, combustion engine, etc., can solve problems such as the inability to evaluate vehicle driving risks in real time and accurately, and achieve the effect of ensuring rationality
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
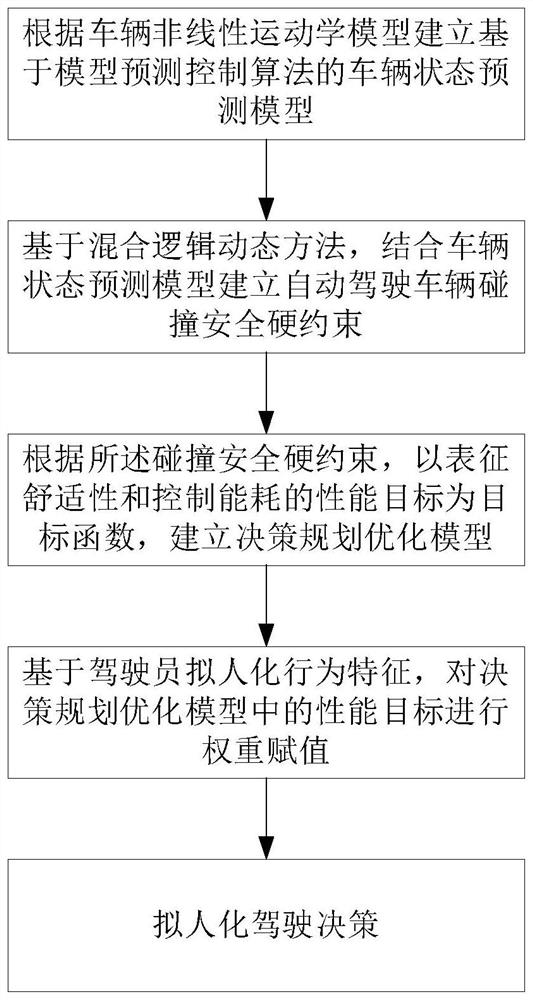
[0070] This embodiment provides an anthropomorphic automatic driving strategy based on model predictive control, such as figure 1 shown, including the following steps:
[0071] S1: Establish a vehicle state prediction model based on model predictive control algorithm based on vehicle nonlinear kinematics model
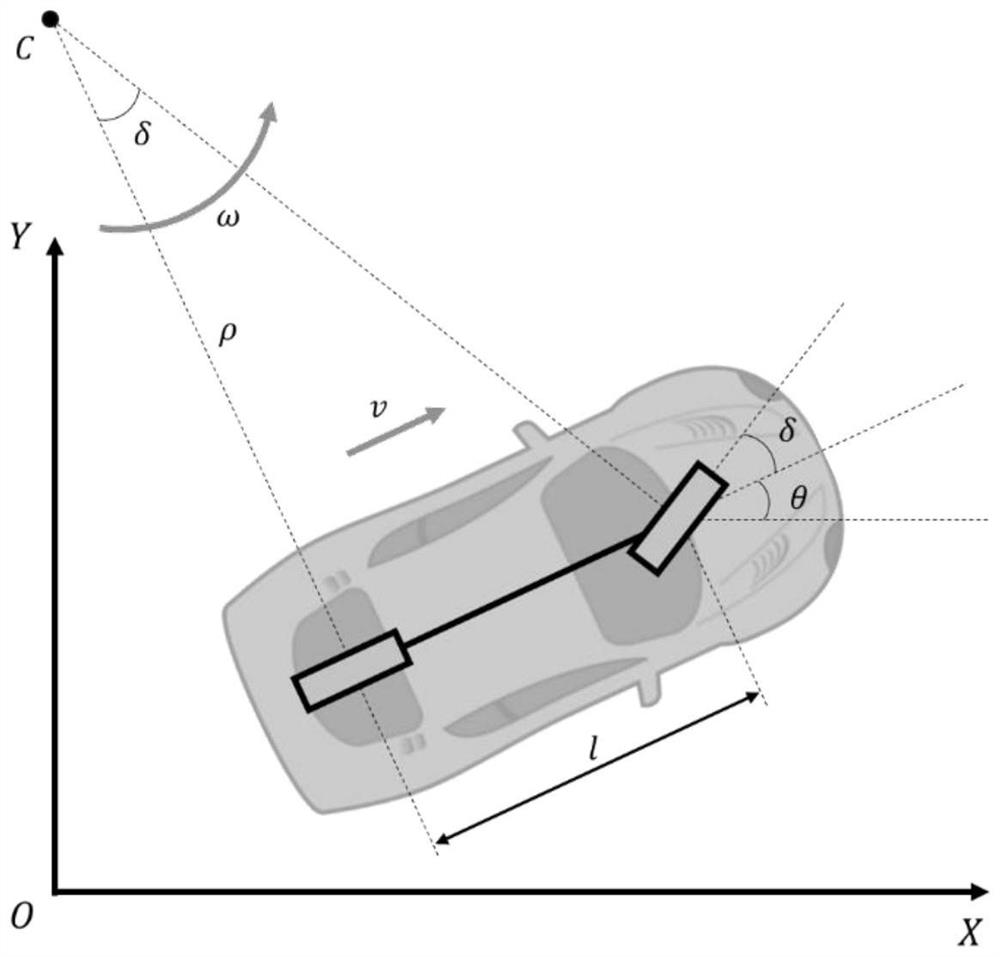
[0072] S1.1: Establish vehicle nonlinear kinematics model according to vehicle speed and front wheel angle
[0073] Taking the vehicle speed and front wheel angle as the system input, the nonlinear kinematics model of the vehicle is established as follows:
[0074]
[0075] In the above formula (1), v is the speed of the vehicle, θ is the heading angle of the vehicle, δ is the steering angle of the front wheel of the vehicle, l is the wheelbase of the vehicle, and x, y are the x, y coordinates of the center of mass of the vehicle.
[0076] S1.2: Establish vehicle state prediction model based on model predictive control algorithm according to vehicle nonlinear kine...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More