Three-dimensional imaging equipment for engineering project planning and imaging method thereof
A technology for three-dimensional imaging and engineering projects, which can be used in the use of re-radiation, instruments, installation, etc., and can solve the problems of low efficiency of measurement methods.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0031] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention.
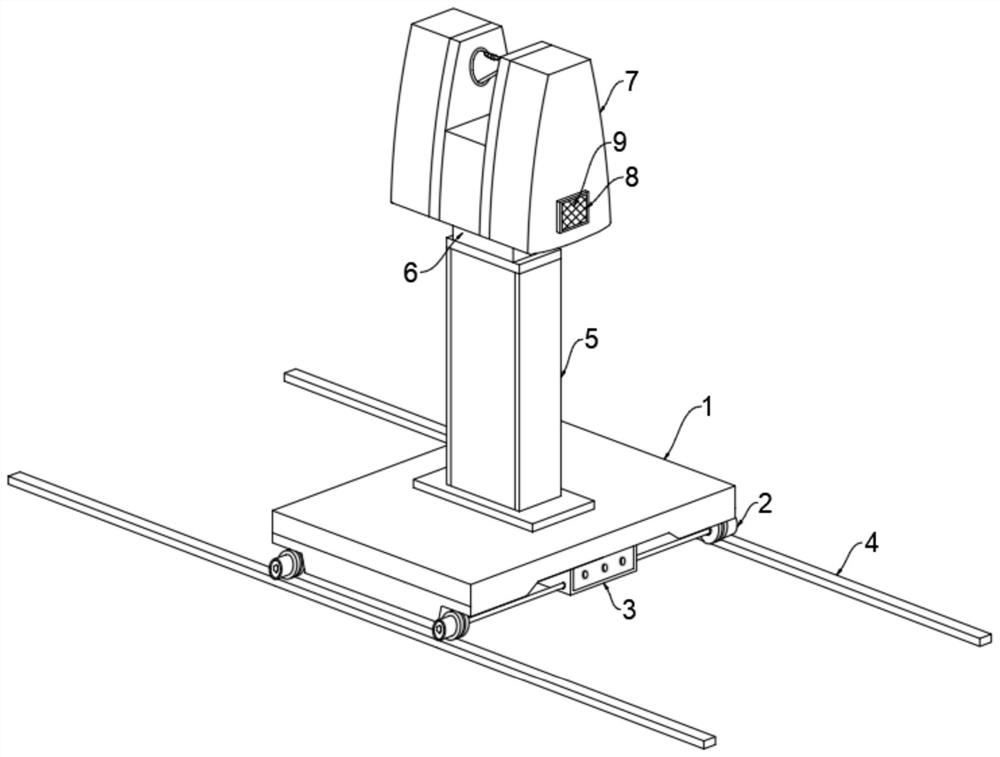
[0032] see Figure 1-6, an embodiment provided by the present invention: a three-dimensional imaging device for engineering project planning, comprising a track flat car base 1, track wheels 2 are installed on both sides of the track flat car base 1, and the track wheels 2 are provided with four , an electrical box 3 is installed below the front end of the rail flat car base 1, a support frame 5 is installed on the upper end of the rail flat car base 1, a rotating base 6 is installed on the upper end of the supporting frame 5, and a three-dimensional scanning device is installed on the upper end of the rotating base 6 7, the three-dimensional scanner 7 includes a lef...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com