

Automatic driving automobile path planning method and system based on offline incremental learning
A path planning and automatic driving technology, applied in the direction of motor vehicles, control/regulation systems, non-electric variable control, etc., can solve the problem that the optimal vehicle trajectory planning scheme cannot be obtained quickly, so as to avoid computational overhead and overcome complexity. and nonlinear constrained problems, reasonable effect of distance metric
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0121] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
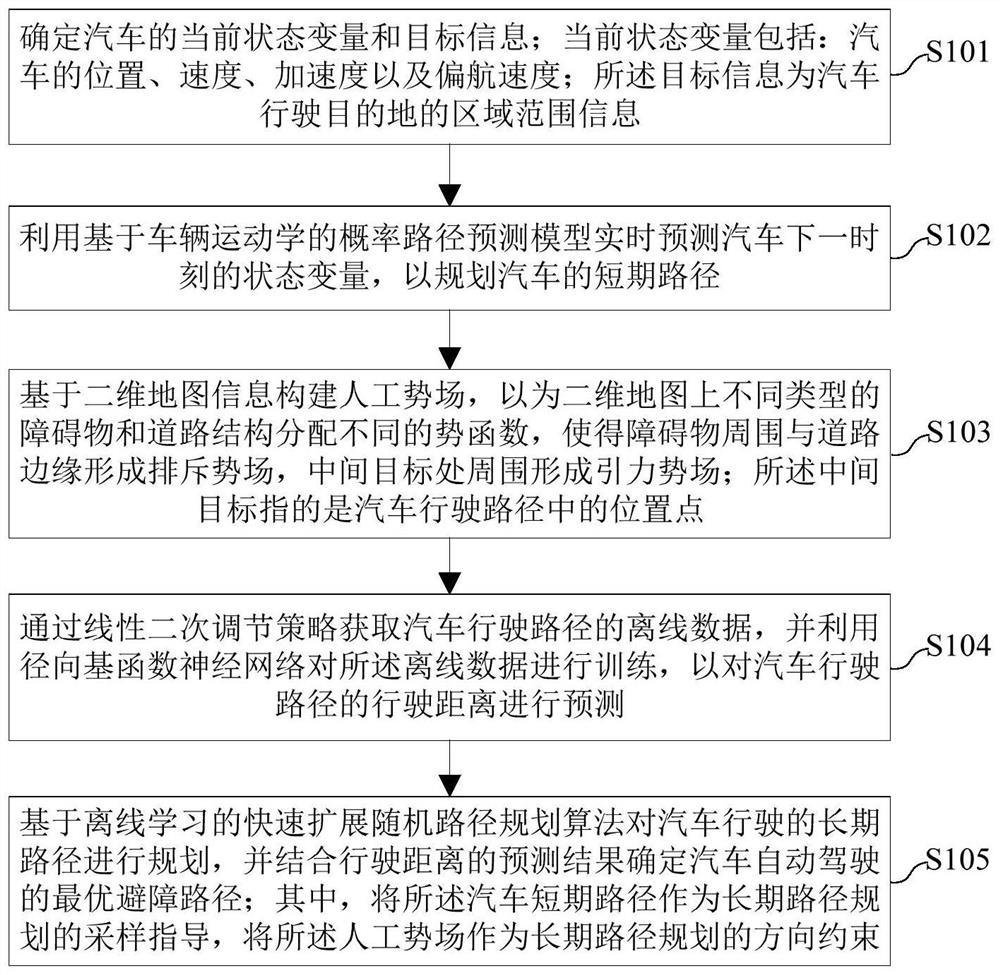
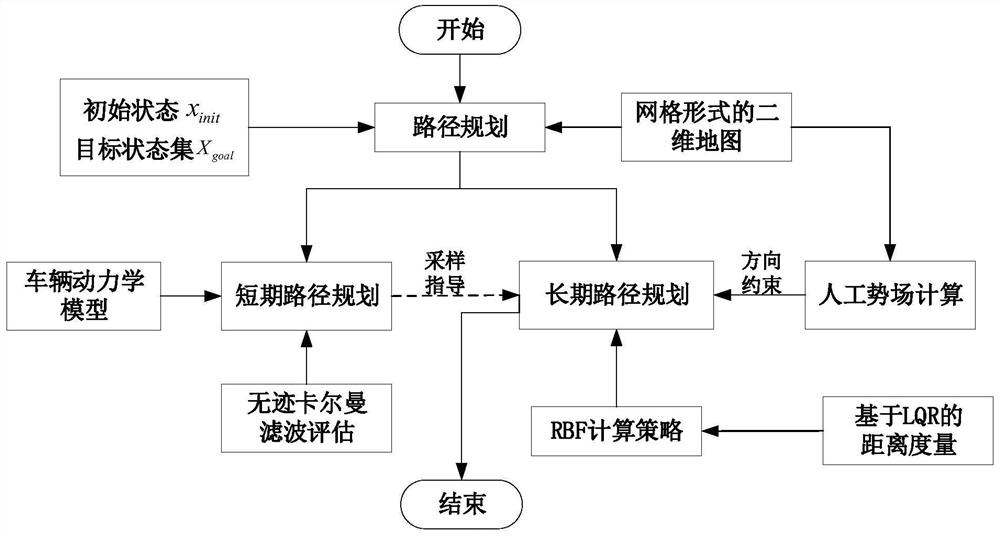
[0122] Aiming at the uncertainties in vehicle initial state, sensor measurement, localization and maneuverability, a trajectory prediction method combining safety-based short-term planning and efficiency-based long-term planning is proposed. Short-term planning mainly considers the uncertainty of trajectory prediction caused by the initial state, such as the perception error of positioning, and the uncertainty of kinematics, so that the trajectory planning method avoids extreme situations in the short term. Efficiency-oriented long-term forecasting takes into account long-term driving goals and avo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More