Energy ablation needle holding device, surgical robot and energy ablation system
A surgical robot and clamping device technology, which is applied to surgical robots, surgical instrument support, heating surgical instruments, etc., can solve the problems of inaccurate needle placement depth, affecting the normal treatment process, etc., and achieve the effect of improving the treatment effect.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
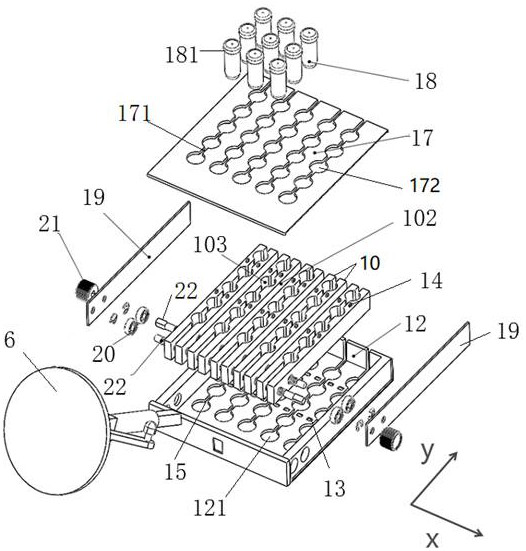
[0059] This embodiment provides an energy ablation needle clamping device, such as Figure 1-Figure 5 As shown in the figure, it is used to realize the auxiliary needle-arranging operation during the treatment process such as surgery. The energy ablation needle holding device includes:
[0060] The clamping mechanism is used to connect to the mechanical arm 6 of the surgical robot, and the mechanical arm 6 is used to drive the clamping mechanism to move.
Embodiment approach
[0061] In this embodiment, the function of the clamping mechanism is to realize the clamping operation of the object to be clamped. The specific structure of the clamping mechanism is not limited. As an implementation, as figure 1 shown, the clamping mechanism consists of:
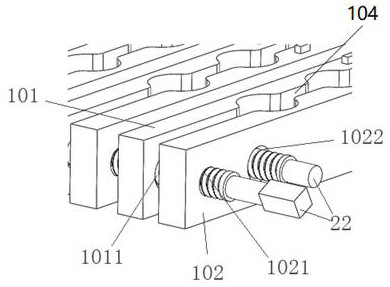
[0062] Several clamping assemblies 10 arranged side by side, such as figure 1 As shown, a plurality of clamping assemblies 10 are arranged along the x-axis in the figure. Specifically, each clamping assembly 10 includes a first clamping part 101 and a second clamping part 102 , the first clamping part 101 and the second clamping part 102 are elongated structures, and the first clamping part 101 and the second clamping part 102 are elongated structures. A plurality of sleeve mounting portions 103 are formed at positions corresponding to the one clamping portion 101 and the second clamping portion 102 .
[0063] In this embodiment, the first clamping part and the second clamping part are provided with th...
Embodiment 2
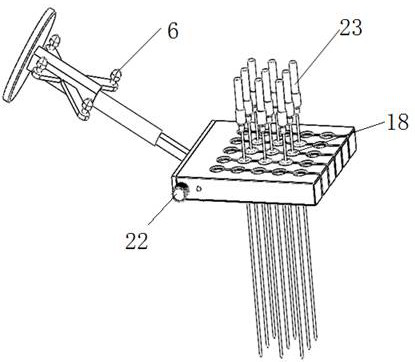
[0100] This embodiment provides a surgical robot, such as figure 2 shown, including:
[0101] Robotic Arm 6. Specifically, the robotic arm 6 itself can move in space. The power source of the robotic arm 6 can be manually driven, or a plurality of motor structures can be set on the robotic arm 6. The specific setting method is not limited in this embodiment. , conventional operations in the prior art can be used.
[0102] In the energy ablation needle clamping device provided in Embodiment 1, the mechanical arm acts on the energy ablation needle clamping device to drive the energy ablation needle clamping device to move;
[0103] Further, the mechanical arm 6 is connected to the clamping mechanism of the energy ablation needle clamping device, and the connection mode between the mechanical arm 6 and the clamping mechanism is not limited. The mechanical arm 6 can be directly connected to the clamping mechanism, or can be It is connected with the clamping mechanism through th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com