

Rotor wing-tilt hybrid unmanned aerial vehicle nonlinear model predictive control method
A nonlinear model, predictive control technology, applied in adaptive control, general control system, control/regulation system, etc., can solve the problems of model interference, uncertainty, limited number of linear model sampling points, etc., to improve stability and track performance, optimize utilization
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
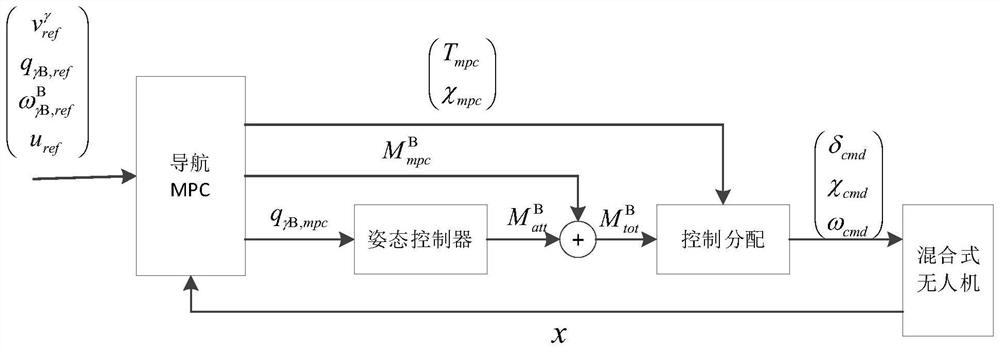
[0068] Embodiment 1 of the present application provides a method such as figure 1 The non-linear model predictive control method of the rotor-tilt hybrid UAV is shown as follows:
[0069] Step 1. Define the important parameters of the UAV; in step 1, the UAV can realize any flight angle on the mechanical structure, including 11 driving degrees of freedom, and the driving degrees of freedom are determined by the four propeller angular velocity vectors w 1 ,w 2 ,w 3 ,w 4 , five control planes δ E and two tilt angles χ r , χ l composition; is the parameter dimension, attitude quaternion q 0 and Composition vector for attitude quaternion, H is Hamilton space;
[0070] Step 2. The controller of the rotary wing-tilt hybrid UAV must be able to deal with the problem of control authority changes. It is necessary to establish a highly nonlinear model and design a nonlinear model based on the navigation MPC algorithm (guidance-MPC); the nonlinear model includes navigation ...
Embodiment 2
[0129] On the basis of Embodiment 1, Embodiment 2 of the present application provides a verification method for the nonlinear model predictive control method of the rotor-tilt hybrid UAV in Embodiment 1:
[0130] Experimental result 1
[0131] Verify the control assignment algorithm, reconstruct the actual generated driving force and torque vector f according to Equation (23) and the brake command act , and with the expected value f of the initial thrust and torque vector des Compare. Table 3 below shows the statistical results of the relative error average μ and standard deviation σ between the driving force and torque generated by the experiment and the expected value. The results show that the relative error mean value μ and standard deviation σ are basically the same in different coordinate axis directions, and the standard deviation σ is controlled within 10%. Verify the accuracy and effectiveness of the control method proposed by the present invention.
[0132] Table...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More