Real-time navigation method and device, unmanned vehicle, computer equipment and storage medium
A navigation method and unmanned vehicle technology, applied in the direction of measuring devices, radio wave measuring systems, instruments, etc., can solve the problems of constant speed, not too fast, easy failure at corners, etc., to improve stability and avoid control failure Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The technical solutions in the embodiments of the present application will be clearly and completely described below with reference to the accompanying drawings in the embodiments of the present application. Obviously, the described embodiments are only a part of the embodiments of the present application, but not all of the embodiments. Based on the embodiments in this application, all other embodiments obtained by those of ordinary skill in the art without creative efforts shall fall within the protection scope of this application.
[0032] Application overview
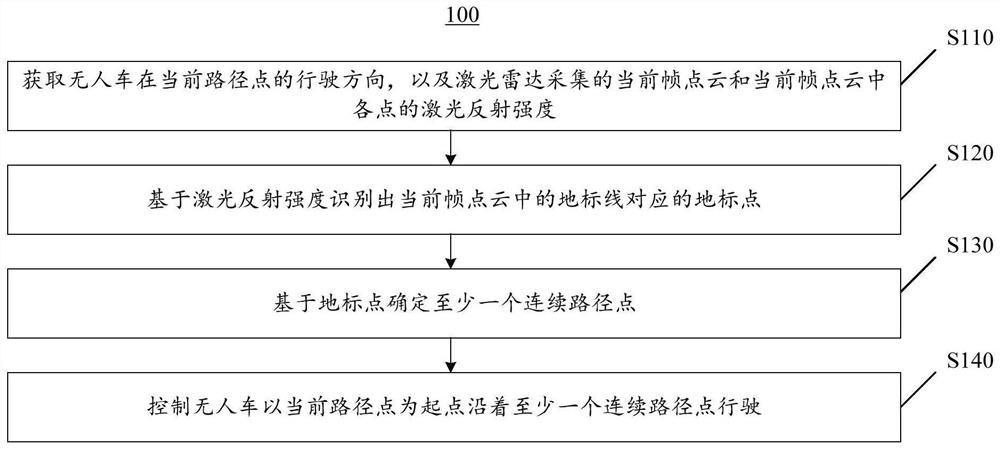
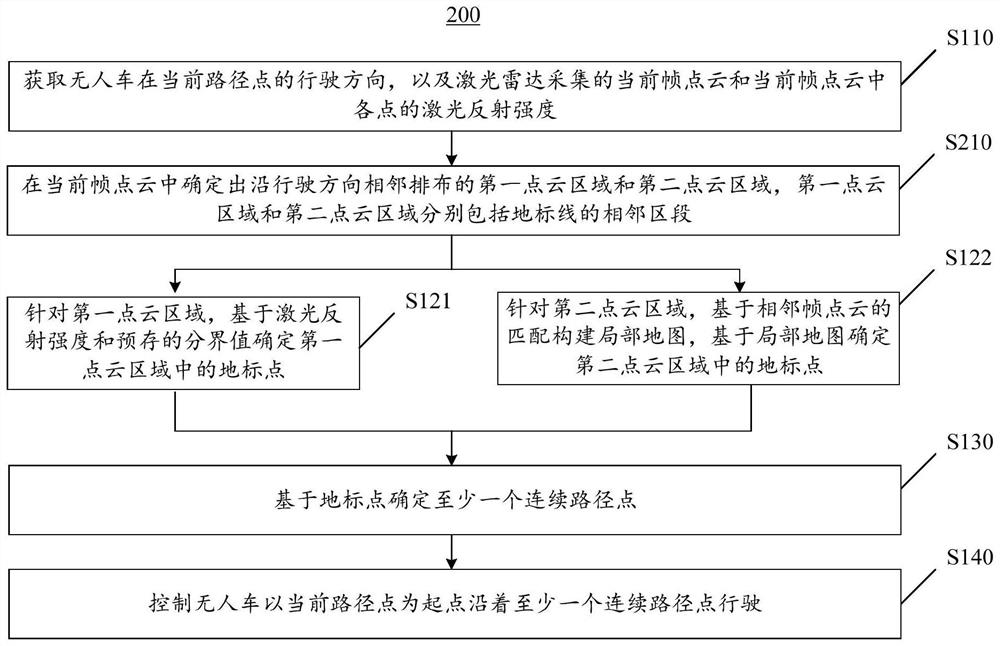
[0033] As mentioned in the background art, the autonomous navigation method of the unmanned vehicle for farm work is usually based on images, and this type of navigation method has the problems that it is easy to fail at the corners, the speed is constant, and the speed cannot be too fast. In order to solve the above problems, the present application provides a real-time navigation method and device based on ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More