Walking operation planning method, device and equipment of mobile robot and medium
A mobile robot and planning technology, applied in two-dimensional position/channel control, instruments, motor vehicles, etc., can solve problems that affect the walking safety of mobile robots, complex business scenarios, and path navigation program errors, etc., to ensure walking safety performance, improve safety, and ensure safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
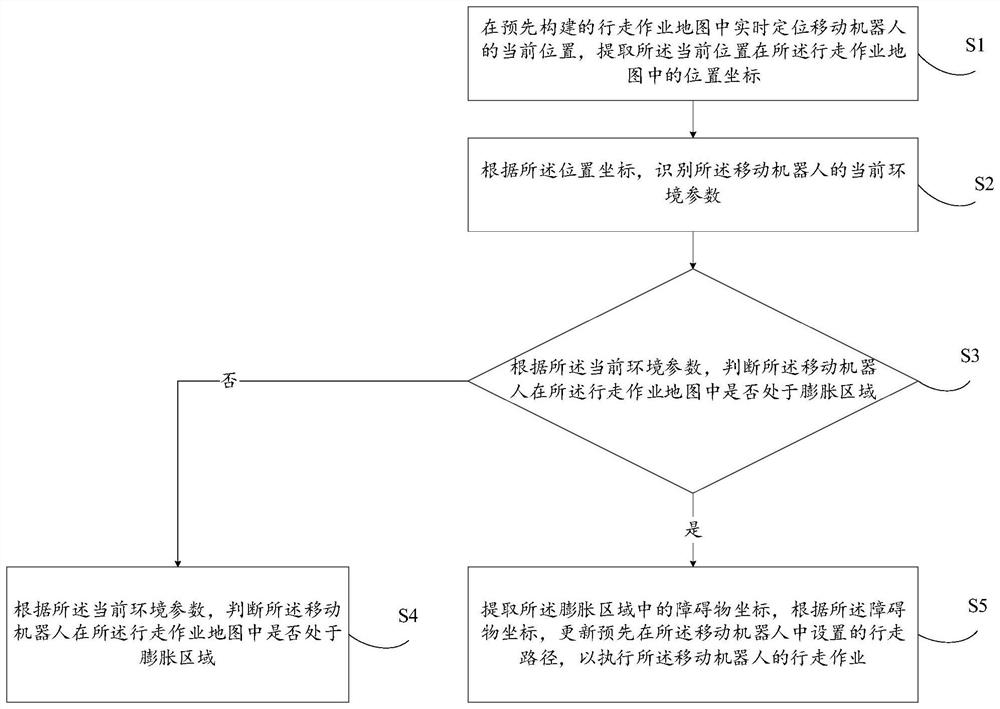
[0052] It should be understood that the specific embodiments described here are only used to explain the present invention, and are not intended to limit the present invention.
[0053] An embodiment of the present invention provides a method for planning a walking operation of a mobile robot. The execution subject of the method for planning a walking operation of a mobile robot includes, but is not limited to, a server, a terminal, etc. that can be configured to execute the method provided by the embodiment of the present invention. at least one of electronic devices. In other words, the walking operation planning method of the mobile robot can be executed by software or hardware installed on the terminal device or server device, and the software can be a block chain platform. The server includes, but is not limited to: a single server, a server cluster, a cloud server or a cloud server cluster, and the like. The server can be an independent server, or it can provide cloud ser...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com