

Mechanical arm null-space real-time obstacle avoidance control method and system
A control method and technology of robotic arms, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of low robot efficiency, robots do not have the ability to actively avoid obstacles, etc., and achieve the effect of improving speed and accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] Below the attachment in the embodiments of the invention will be clearly and fully described in the technical solutions in the embodiments of the present invention. Obviously, the embodiments described are only a part of the embodiments of the invention, not all embodiments. Based on the embodiments in the present invention, all other embodiments obtained by ordinary technical personnel in the art under the premise of not creating creative labor belong to the protection of the present invention.
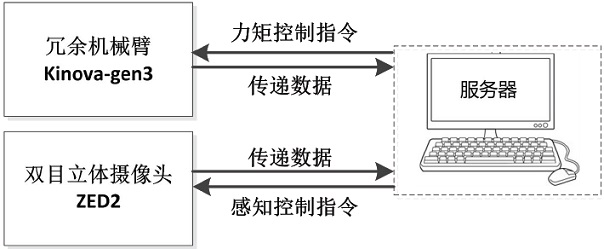
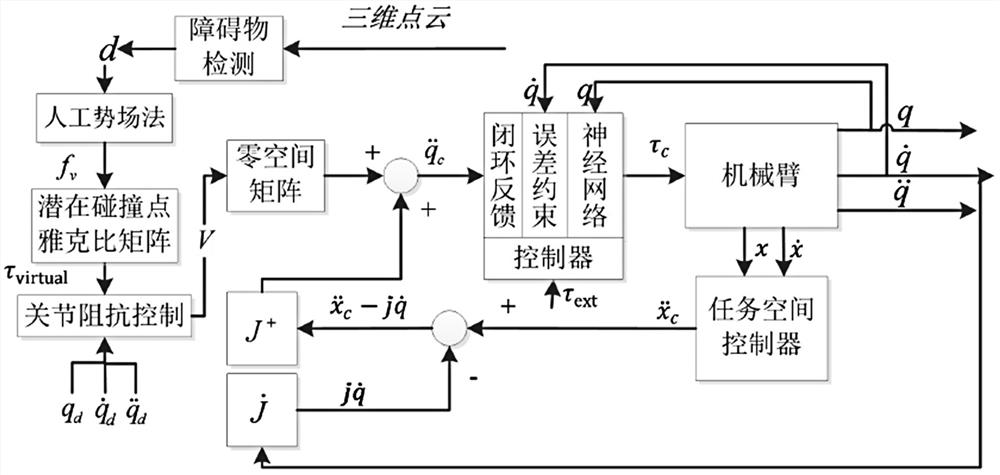
[0021] The embodiment of the present invention provides a real -time disability control control method based on a mechanical arm zero space based on virtual impedance and preset energy functions. Control system, reference figure 1 and figure 2 The method is composed of perception tasks, planning tasks and control tasks, including the following steps:
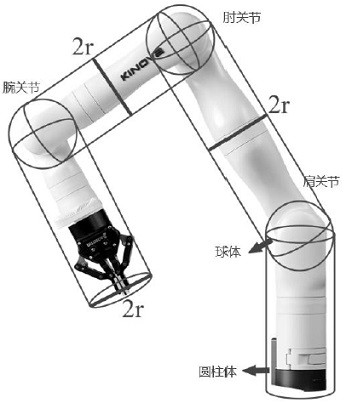
Collect obstacle information, obtain the three -dimensional coordinates of obstacles, and complete the perception task;
Based on t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More