

Autonomous recognition system and method for uncertain poses of robot
A technology of recognition system and recognition method, which is applied in the field of autonomous recognition system of robot uncertain pose, can solve problems affecting the effect of operation accuracy, uncertain pose, position deviation, etc., to reduce system complexity and cost, and improve success rate and improve work efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
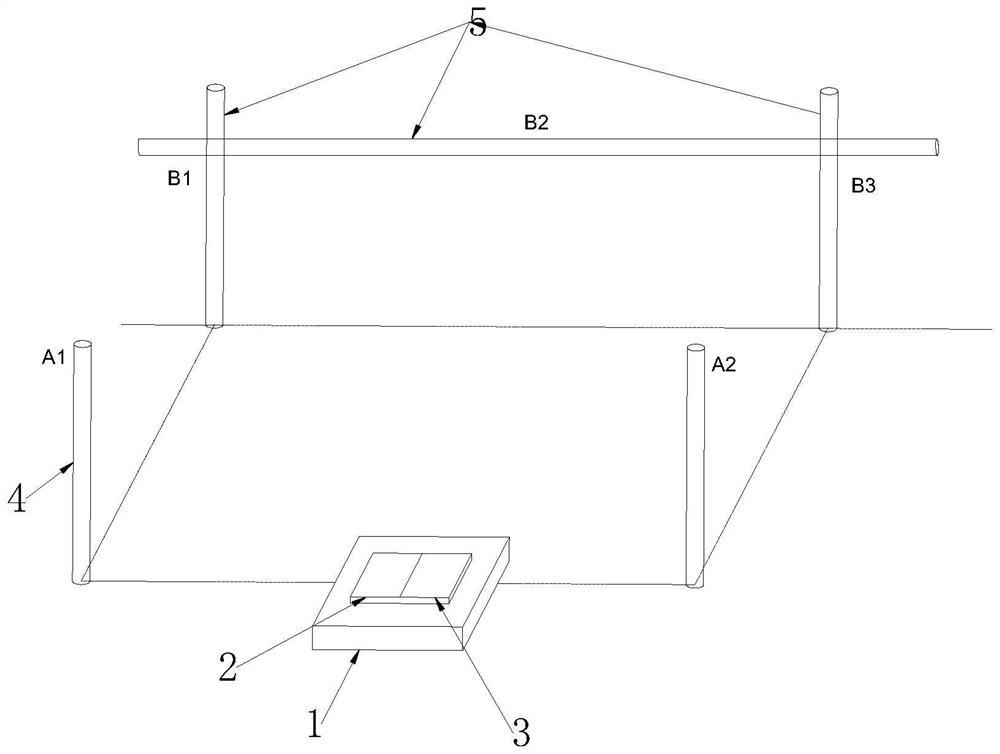
[0030] Embodiment: An autonomous recognition system for a robot with uncertain pose, including a robot 1 and an environmental marker, wherein the robot 1 contains a control and computing unit, a motion unit, a visual sensor 2 and a laser ranging sensor 3; the environmental marker The objects include a primary position marker 4 and a precise position marker 5. The function of the primary position marker 4 is to provide an environment identification to the robot 1. After the robot 1 recognizes the primary position marker 4, it marks that the robot 1 enters the allowable position range. The initial position marker can be expanded into a combination of various markers; the function of the precise position marker 5 is to provide the environment identifier to the robot 1, and the robot 1 can judge the pose of its current position according to the precise environment marker, and the precise position The marker 5 can be expanded into a variety of marker combinations. In the above proce...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More