

SLAM autonomous navigation identification method in closed scene
A technology of autonomous navigation and identification method, applied in the field of image processing, to achieve the effect of strong practicability and simple calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
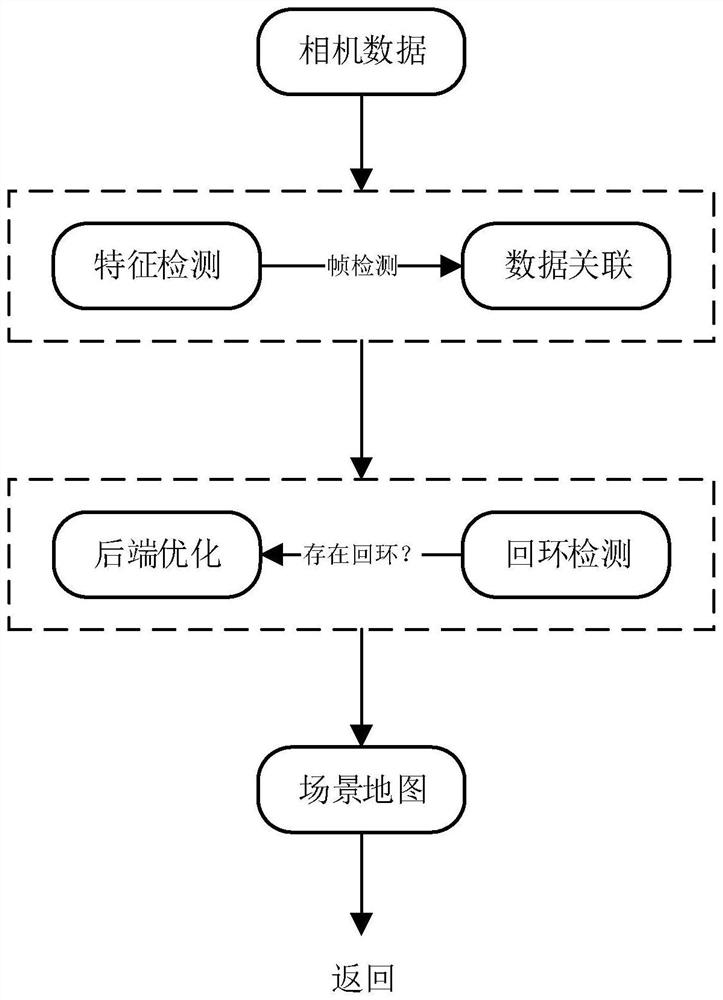
[0033] Attached below figure 1 The present invention is further described, a SLAM autonomous navigation and identification method in a closed scene, comprising the following steps:
[0034] Step 1: Obtaining external environment data, the autonomous robot obtains external environment data through its own camera;
[0035] Step 2: Feature detection, input the acquired external environment data into the SLAM feature extraction module, and the SLAM feature extraction module uses the Vision transformer model to realize the semantic detection of each object in the external environment, and extract the features of each object at the same time;
[0036] Step 3: Data association, the SLAM data association module tracks the common features of images in different frames, and achieves the same feature matching through the correlation clustering between frames, and then judges the movement of the object; for the successfully matched features , the controller of the autonomous robot correc...
Embodiment 2
[0060] The difference between this embodiment and Embodiment 1 is that the cluster value k=100 is set.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More